Localization
This library documentation can be found here.
This library encloses all available global localization methods. Currently it supports QR-Code global localization only.
- Specify QR-Code map file path:
- rapp::object::qr_code_3d QRcodes - delivered by rapp::robot::vision::qr_code_detection method.
- std::vector<std::vector> camera_to_robot_matrix - delivered by rapp::robot::navigation::get_transform method.
- std::istream * MapPath
- Input qr_code_map object:
- rapp::object::qr_code_3d QRcodes - delivered by rapp::robot::vision::qr_code_detection method.
- std::vector<std::vector> camera_to_robot_matrix - delivered by rapp::robot::navigation::get_transform method.
- rapp::object::qr_code_map QRmap
- Output:
- rapp::object::pose
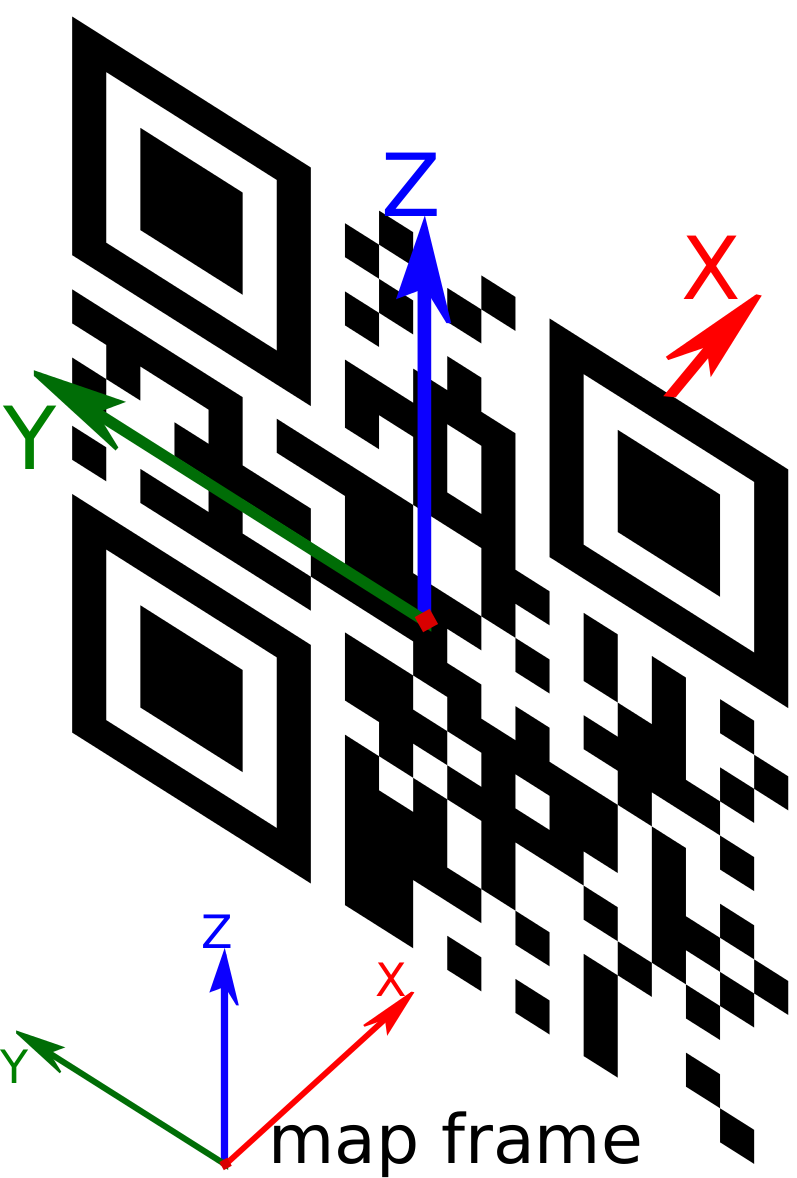
- Determine 3D poses of every QR-Code with respect to your environment map origin (origin of the map is set in its .yaml file). QR-Code frame orientation is depictured as follows:
- Compose .xml file as follows:
- Paste following header:
<?xml version="1.0"?>
<!DOCTYPE catalog SYSTEM "catalog.dtd">
<QRcodes>- Add QR-Codes using following template:
<QR> <!-- Open QR-Code -->
<!-- QR-Code position -->
<x>0</x>
<y>0</y>
<z>0</z>
<!-- QR-Code orientation [quaternion] -->
<ox>0</ox>
<oy>0</oy>
<oz>0</oz>
<ow>1</ow>
<!-- QR-Code label/name/messasge -->
<label>"example1"</label>
</QR> <!-- Close QR-Code -->- Close QRcodes tree:
</QRcodes>