![]()
ROS 2 package suite for Raspberry Pi Mouse Simulator runs on Gazebo
This branch is intended for ROS 2 Jazzy. For other distributions, please refer to the corresponding branches listed below.
- ROS 2 Humble (humble)
requires the following to run:
- Ubuntu
- Ubuntu 24.04 Noble Numbat
- ROS 2
- ROS 2 Jazzy Jalisco
- Gazebo
- Gazebo Sim 8.x
- ROS 2 Package
- ros-jazzy-desktop-full
Download this ROS 2 package.
cd ~/ros2_ws/src
git clone -b $ROS_DISTRO https://github.com/rt-net/raspimouse_sim.gitDownload the dependent ROS 2 packages.
cd ~/ros2_ws/src
git clone -b $ROS_DISTRO https://github.com/rt-net/raspimouse_ros2_examples.git
git clone -b $ROS_DISTRO https://github.com/rt-net/raspimouse_slam_navigation_ros2.git
git clone -b $ROS_DISTRO https://github.com/rt-net/raspimouse_description.git
rosdep install -r -y -i --from-paths raspimouse*Build this package using colcon.
cd ~/ros2_ws
colcon build --symlink-install
source ~/ros2_ws/install/setup.bashAfter building this package, run the following commands.
ros2 launch raspimouse_gazebo raspimouse_with_emptyworld.launch.pyThese exsamples require raspimouse_ros2_examples to operate.
Terminal 1:
ros2 launch raspimouse_gazebo raspimouse_with_emptyworld.launch.pyTerminal 2:
ros2 launch raspimouse_ros2_examples teleop_joy.launch.py joydev:="/dev/input/js0" joyconfig:=f710 mouse:=false
Terminal 1:
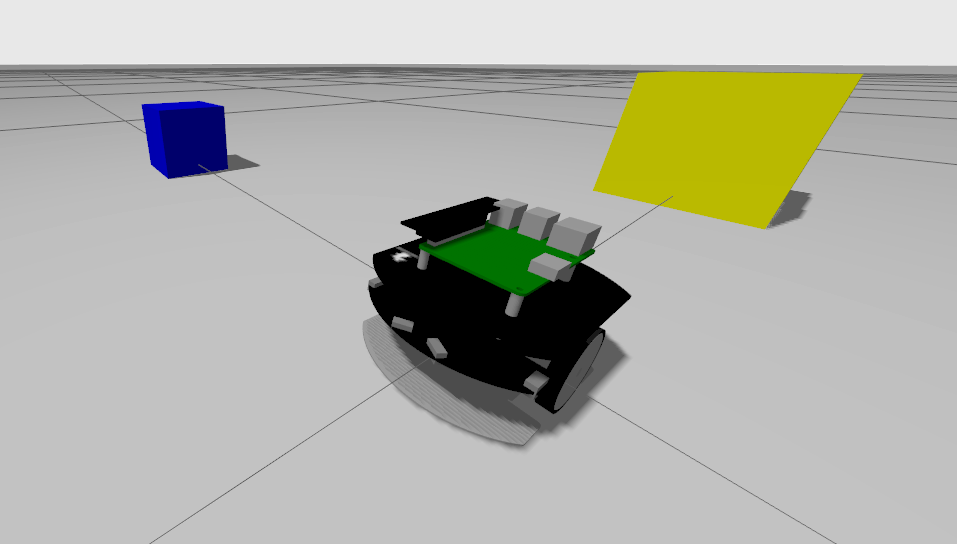
ros2 launch raspimouse_gazebo raspimouse_with_color_objects.launch.py use_rgb_camera:=trueTerminal 2:
ros2 launch raspimouse_ros2_examples object_tracking.launch.py mouse:=false use_camera_node:=falseTerminal 1:
ros2 launch raspimouse_gazebo raspimouse_with_line_follower_field.launch.py use_rgb_camera:=true camera_downward:=trueTerminal 2:
ros2 launch raspimouse_ros2_examples camera_line_follower.launch.py mouse:=false use_camera_node:=falseTerminal 3: Start
ros2 topic pub --once /switches raspimouse_msgs/msg/Switches "{switch0: false, switch1: false, switch2: true}"Terminal 3: Stop
ros2 topic pub --once /switches raspimouse_msgs/msg/Switches "{switch0: true, switch1: false, switch2: false}"For information on parameters in camera line follower, click here.
This exsample requires raspimouse_slam_navigation_ros2 to operate.
Terminal 1:
ros2 launch raspimouse_gazebo raspimouse_with_lakehouse.launch.py lidar:=urgThe lidar option supports urg, lds, and rplidar.
Terminal 2:
ros2 launch raspimouse_ros2_examples teleop_joy.launch.py joydev:="/dev/input/js0" joyconfig:=f710 mouse:=falseTerminal 3:
ros2 launch raspimouse_slam pc_slam.launch.py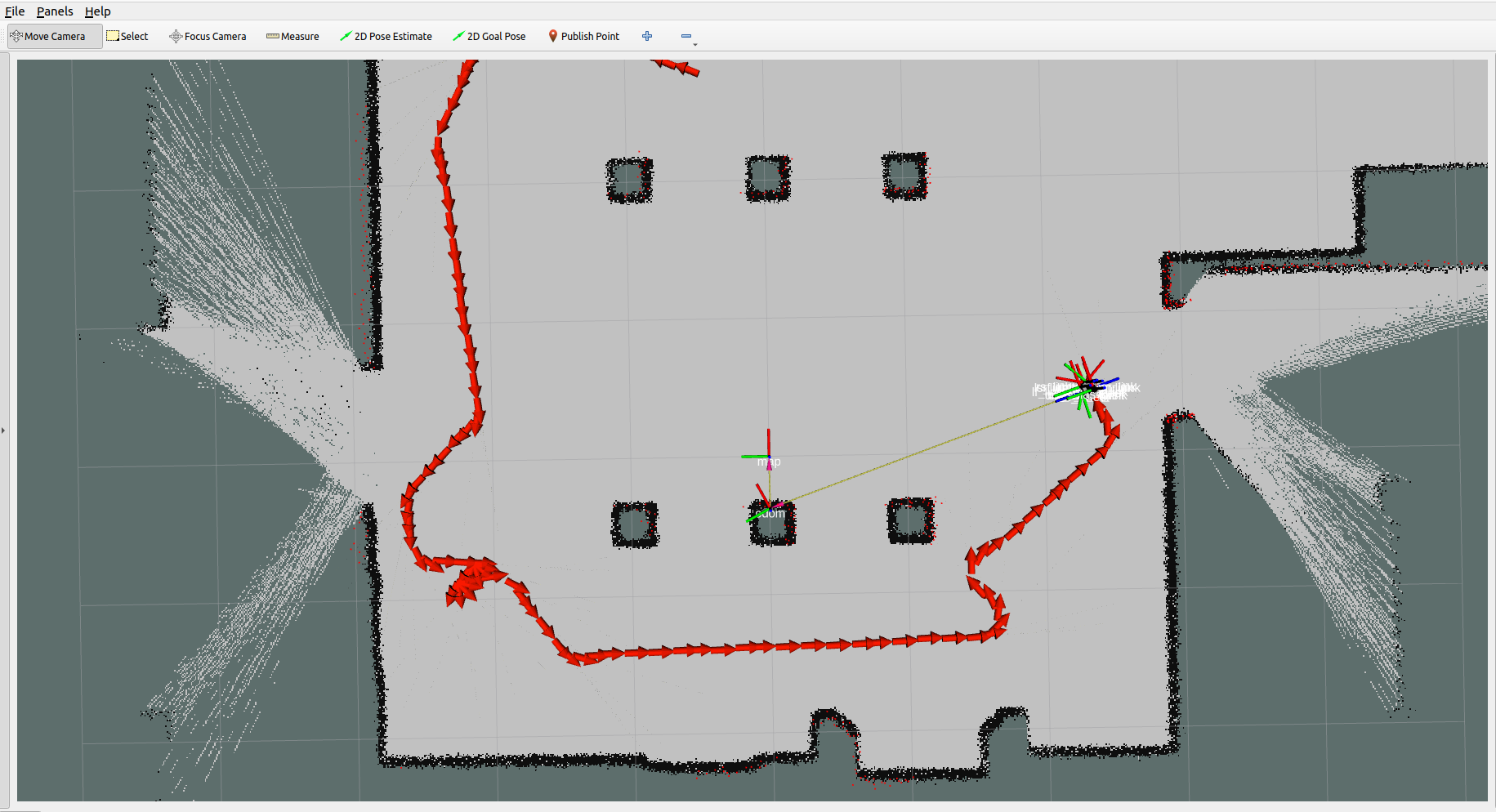
Terminal 4:
ros2 run nav2_map_server map_saver_cli -f ~/MAP_NAME
Terminal 1:
ros2 launch raspimouse_gazebo raspimouse_with_lakehouse.launch.py lidar:=urgThe lidar option supports urg, lds, and rplidar.
Terminal 2:
ros2 launch raspimouse_navigation pc_navigation.launch.py use_sim_time:=true map:=$HOME/MAP_NAME.yaml
Curve course panel for line following. Panel size is 50 cm x 50 cm and line width is 4 cm.

Straight course panel for line following. Panel size is 50 cm x 50 cm and line width is 4 cm.

Each cube is 5 cm, 7.5 cm, 10 cm, and 15 cm, 30 cm on a side. The cube colors are red, yellow, blue, green and black.
The dae file is edited in Blender 4.0.
This repository is licensed under the MIT license, see LICENSE. Unless attributed otherwise, everything in this repository is under the MIT license.
- CIR-KIT/fourth_robot_pkg
- author
- RyodoTanaka
- maintainer
- RyodoTanaka
- BSD (BSD 3-Clause License)
- See package.xml for details.
- author
- yujinrobot/kobuki
- authors
- Daniel Stonier
- Younghun Ju
- Jorge Santos Simon
- Marcus Liebhardt
- maintainer
- Daniel Stonier
- BSD (BSD 3-Clause License)
- See package.xml for details。
- authors