- 와이더플래닛 사내 동아리( 와삼디 ) 첫번째 로봇 작품.
- Raspberray PI 3 B+
- Maestro 12 chanel servo control
- 카메라 : 노보맥스 리얼 HD 1300만 화소 ( QCAM-1200HD )
- 로봇 하드웨어는 http://www.rcr3d.com/hardware.html 사용.


- maestro 12 chanel servo controller over USB ( Python ) https://github.com/FRC4564/Maestro
- 소프트웨어는 https://github.com/RobertLucian/rubiks-cube-solver 를 베이스로 개발. ( thanks for RobertLucian )

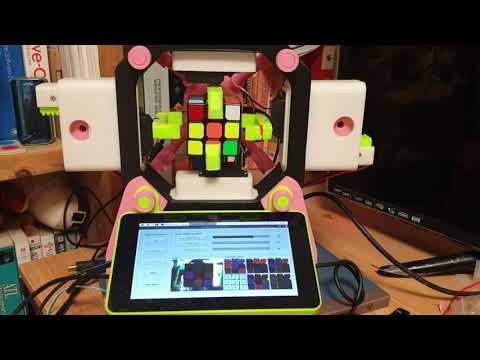
- 초기 버전

- 완성 버전




- Ender 3
- Raspbian Buster with desktop and recommended software ( Version : July 2019 )
- https://www.raspberrypi.org/downloads/raspbian/
- python3.7
- opencv
- serial
- random
- numpy
- webcolors
- kociemba
- tkinter
- sklearn.cluster import KMeans
-
2019.08.13 : Rubiks LCD 장착.



-
2019.08.12 : Rubiks LCD 배송 완료.

-
2019.08.09 : Rubiks 소프트웨어 릴리즈 및 버그 픽스 & 풀 테스트
-
2019.08.04 : Rubiks 소프트웨어 동작 테스트



-
2019.07.30 : 3D 프린트 Rubiks 부품 추가 프린트

-
2019.07.30 : 3D 프린트 Rubiks 부품 추가 프린트
-
2019.07.29 : 루빅 큐브 구매


-
2019.07.17 : Rubiks 소프트웨어 개발 시작 ( opencv install )

-
2019.07.16 : 3D 프린트 Rasberry PI CASE 출력


-
2019.07.15 : Rasberry PI 3 B+ 도착


-
2019.07.15 : Rubiks Robot 동작 테스트

-
2019.07.14 : Rubiks 서보 테스트 시작

-
2019.07.13 : 3D 프린터 Rubiks 부품 추가 프린트

-
2019.07.11 : 3D 프린터 Rubiks 부품 추가 프린트

-
2019.07.11 : 3D 프린터 Rubiks + Maestro 연결

-
2019.07.11 : 3D 프린터 Rubiks + Maestro 동작 테스트
-
2019.07.08 : 3D 프린터 Rubiks 부품 조립

-
2019.07.08 : 3D 프린터 Rubiks 부품 리스트

-
2019.07.09 : 3D 프린터 Rubiks 부품 추가 프린트

-
2019.07.05 : servo 및 Rubiks 각종 부품 도착

-
2019.07.05 : 3D 프린터 Rubiks 부품 출력 ( 실패 )


-
2019.07.01 : 3D 프린터 Rubiks 부품 출력

-
2019.06.28 : 3D 프린터 Rubiks 부품 출력

-
2019.06.27 : 3D 프린터 Case 주문 처리

-
2019.06.26 : 3D 프린터 Rubiks 부품 출력

-
2019.06.25 : 3D 프린터 Rubiks 부품 출력 시작

-
2019.06.24 : 3D 프린터 테스트 출력

-
2019.06.18 : 3D 프린터 테스트 출력

-
2019.06.05 : 3D 프린터 설치

-
기타

-
실패작들








































- 전규안
- 정수동
- 신충식
- 이창준
- 우경창
- 홍성학
- 김종현
- 이승훈
- 백준석