The visual-multi-crop-row-navigation project is a software implementation of a visual navigation system for agricultural robots. The goal of the project is to enable agricultural robots to navigate accurately within a field, and identify and navigate between different crop rows.
The project is implemented in Python and makes use of the OpenCV library for image processing and computer vision tasks. The navigation system uses a monocular camera mounted on the robot, and relies on the visual features of the plants and the soil to determine the robot's position and orientation within the field.
The repository includes the following files and directories:
- data: This directory contains example images and data used for testing and evaluation.
- docs: This directory contains documentation for the project, including a detailed description of the algorithms and methods used, as well as instructions for how to use and set up the system.
- src: This directory contains the source code for the project. The main files are: navigator.py: This file contains the main navigation class, which implements the core navigation algorithms and methods. visualizer.py: This file contains a helper class for visualizing the results of the navigation algorithm, such as the detected crop rows and the estimated robot pose.
- tests: This directory contains unit tests for the various components of the navigation system.
To use the visual-multi-crop-row-navigation system, you will need to install the required dependencies, including Python and the OpenCV library. The instructions for installation and setup are provided below. Once the dependencies are installed, you can run the navigation system using the navigator.py script, and visualize the results using the visualizer.py script.
Please also see the docs directory for more detailed documentation and usage instructions.
A work presented in IROS 2022 - Kyoto, Japan

Check out the video1, of our robot following this approach to navigate on a real multi lace row-crop field (beans field).
wget https://developer.download.nvidia.com/compute/cuda/repos/ubuntu1804/x86_64$
sudo mv cuda-ubuntu1804.pin /etc/apt/preferences.d/cuda-repository-pin-600
wget https://developer.download.nvidia.com/compute/cuda/10.2/Prod/local_install$
sudo dpkg -i cuda-repo-ubuntu1804-10-2-local-10.2.89-440.33.01_1.0-1_amd64.deb
sudo apt-key add /var/cuda-repo-10-2-local-10.2.89-440.33.01/7fa2af80.pub
sudo apt-get update
sudo apt-get -y install cuda
- OpenCV == 3.3.0.10
- pip install opencv-python==3.3.0.10
- pip install opencv-contrib-python==3.3.0.10
- ROS Melodic
- itertools
- scipy >= 1.5.2
- numpy >= 1.19.9
navigate to your catkin workspace folder, e.g.:
cd catkin_ws/
compile:
rm -r build/
rm -r devel/
catkin_make
source setup file:
source ./devel/setup.bash
launch main script:
roslaunch visual_multi_crop_row_navigation vs_navigation.launch
-
Thorvald Platfrom package Thorvald Saga
-
ROS Melodic
-
python packages:
sudo apt-get install python-catkin-tools python3-dev python3-catkin-pkg-modules python3-numpy python3-yaml ros-melodic-cv-bridge python3-opencv python3 -m pip install scikit-build scikit-learn laspy pandas -
build CV_Bridge for python3:
cd catkin_ws git clone https://github.com/ros-perception/vision_opencv.git src/vision_opencvFind version:
sudo apt-cache show ros-melodic-cv-bridge | grep Version Version: 1.12.8-0xenial-20180416-143935-0800Checkout right version in git repo. In our case it is 1.12.8
cd src/vision_opencv/ git checkout 1.12.8 cd ../../build
catkin_make --cmake-args \ -DCMAKE_BUILD_TYPE=Release \ -DPYTHON_EXECUTABLE=/usr/bin/python3 \ -DPYTHON_INCLUDE_DIR=/usr/include/python3.6m \ -DPYTHON_LIBRARY=/usr/lib/x86_64-linux-gnu/libpython3.6m.so
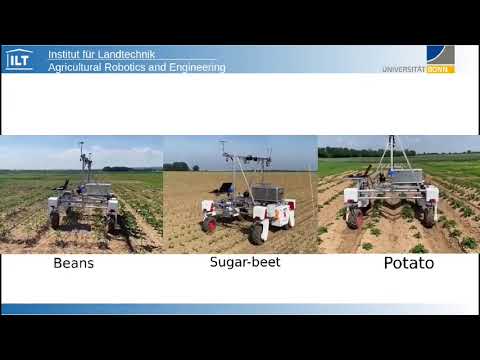
used for analyze the robustness of crop-row detection technique as a quantitative evaluate. For each of the five crops (sugar_beet, potato, beans, lemon-balm and coriander) and three simulated fields, 100 images were annotated using data from BonnBot-I where the camera tilt angle ρ was varied from 55◦ to 75◦. The annotations contain ground-truth of all the lines located underneath the robot. To measure the accuracy we compare the predicted lines of each image to the ground-truth using two parameters: position and orientation. The position of a line is defined based on its intersection with bottom edge of the image, where the distance between the prediction and the ground truth is normalized based on the width of the image.
for accessing dataset please sned an email to: Alireza.ahmadi@uni-bonn.de
if you use this project in your recent works please refernce to it by:
@article{ahmadi2021towards,
title={Towards Autonomous Crop-Agnostic Visual Navigation in Arable Fields},
author={Ahmadi, Alireza and Halstead, Michael and McCool, Chris},
journal={arXiv preprint arXiv:2109.11936},
year={2021}
}
@inproceedings{ahmadi2020visual,
title={Visual servoing-based navigation for monitoring row-crop fields},
author={Ahmadi, Alireza and Nardi, Lorenzo and Chebrolu, Nived and Stachniss, Cyrill},
booktitle={2020 IEEE International Conference on Robotics and Automation (ICRA)},
pages={4920--4926},
year={2020},
organization={IEEE}
}This work has been supported by the German Research Foundation under Germany’s Excellence Strategy, EXC-2070 - 390732324 (PhenoRob) and Bonn AgRobotics Group