diff --git a/README.md b/README.md
index c336d4c..dbb6893 100644
--- a/README.md
+++ b/README.md
@@ -1 +1,96 @@
-# perception_benchmark_tool
\ No newline at end of file
+# perception_benchmark_tool
+
+This package contains a benchmark tool for testing the perception stack of Autoware.Universe with the Waymo dataset.
+
+## Installation
+
+
+For testing 3D Object Tracking with Waymo Dataset, follow the given steps.
+
+1- Download the Waymo dataset validation segment(.tfrecord) files from the given link. Unpack it to the desired directory.
+
+
+
+
+```bash
+cd ~/Downloads/
+tar -xvf validation_validation_0000.tar
+```
+
+Change the dataset folder from "benchmark_runner.launch.py"
+
+2- Install the Waymo Open Dataset Toolkit.
+
+```bash
+mkdir -p ~/perception_benchmark_ws/src
+cd ~/perception_benchmark_ws/src
+git clone https://github.com/autowarefoundation/perception_benchmark_tool.git
+pip3 install protobuf==3.9.2 numpy==1.19.2
+pip3 install waymo-open-dataset-tf-2-6-0
+```
+
+3- For running Autoware.Universe with the Waymo evaluation node,
+
+Lidar point clouds and camera images are encoded in the .tfrecord file. It may take about ~60-90 seconds to decode
+the data back.
+
+Go to the Autoware folder and source it,
+```bash
+source install/setup.bash
+```
+
+Build perception benchmark tool,
+```bash
+cd ~/perception_benchmark_ws/
+rosdep install -y --from-paths src --ignore-src --rosdistro $ROS_DISTRO
+colcon build
+source install/setup.bash
+```
+
+Run perception benchmark tool,
+```bash
+ros2 launch perception_benchmark_tool benchmark_runner.launch.py
+```
+
+This command will run the perception stack with the Waymo Dataset. We will get the ground truth and prediction files in the file
+paths we give as arguments to the launch file.
+
+Lidar point clouds and camera images are encoded in the .tfrecord file. It may take about ~60-90 seconds to decode
+the data back for each segment file.
+
+4- Install Waymo Open Dataset toolkit for metric computation:
+
+Follow the given command or instruction provided by the Waymo:
+
+```bash
+git clone https://github.com/waymo-research/waymo-open-dataset.git waymo-od
+cd waymo-od
+git checkout remotes/origin/master
+sudo apt-get install --assume-yes pkg-config zip g++ zlib1g-dev unzip python3 python3-pip
+BAZEL_VERSION=3.1.0
+wget https://github.com/bazelbuild/bazel/releases/download/${BAZEL_VERSION}/bazel-${BAZEL_VERSION}-installer-linux-x86_64.sh
+sudo bash bazel-${BAZEL_VERSION}-installer-linux-x86_64.sh
+sudo apt install build-essential
+./configure.sh
+bazel clean
+bazel build waymo_open_dataset/metrics/tools/compute_tracking_metrics_main
+```
+
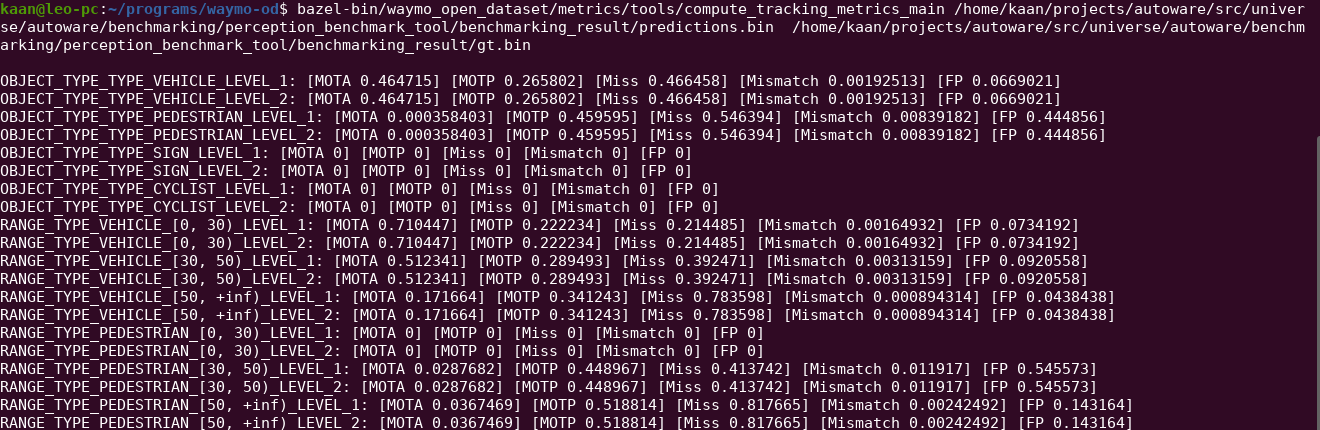
+5- Evaluate tracking result
+
+```bash
+bazel-bin/waymo_open_dataset/metrics/tools/compute_tracking_metrics_main \
+~/benchmark_result/predictions.bin ~/benchmark_result/gt.bin
+```
+
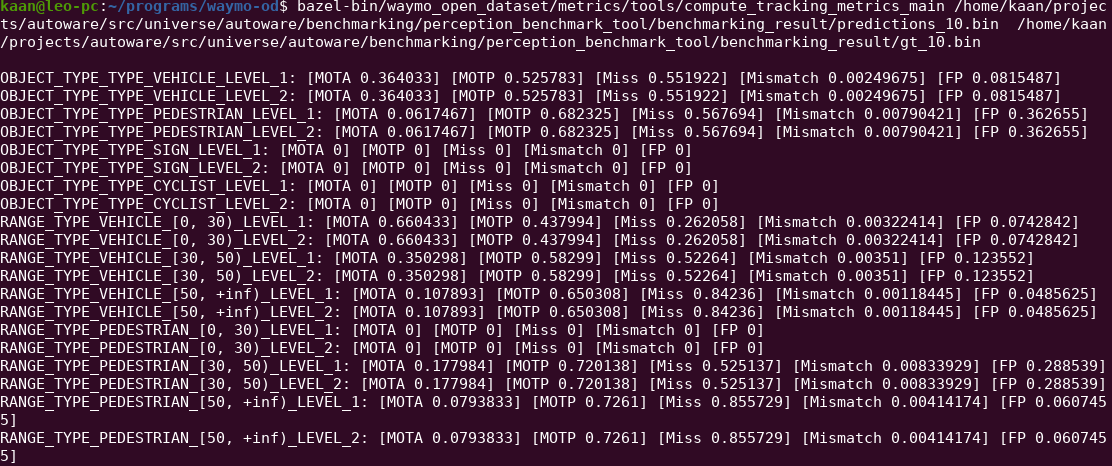
+## Result
+
+The evaluation result of the Perception pipeline on the Waymo Dataset is presented below.
+
+### lidar_centerpoint
+
+
+
+### lidar_apollo_instance_segmentation
+
+
diff --git a/launch/benchmark_runner.launch.py b/launch/benchmark_runner.launch.py
new file mode 100644
index 0000000..2af0c7a
--- /dev/null
+++ b/launch/benchmark_runner.launch.py
@@ -0,0 +1,103 @@
+import os
+from os.path import join as joinPath
+
+from launch import LaunchDescription
+from launch.actions import DeclareLaunchArgument
+from launch.substitutions import LaunchConfiguration
+from launch_ros.actions import Node
+
+
+def generate_launch_description():
+
+ dataset_path_launch_arg = DeclareLaunchArgument(
+ "dataset_path",
+ default_value=joinPath(os.environ["HOME"], "validation_validation_0000"),
+ description="",
+ )
+
+ use_camera_launch_arg = DeclareLaunchArgument(
+ "use_camera",
+ default_value="False",
+ description="",
+ )
+
+ result_path_launch_arg = DeclareLaunchArgument(
+ "result_path",
+ default_value=joinPath(os.environ["HOME"], "benchmark_result"),
+ description="",
+ )
+
+ benchmark_frame_launch_arg = DeclareLaunchArgument("benchmark_frame", default_value="base_link")
+
+ launch_file_launch_arg = DeclareLaunchArgument(
+ "launch_file",
+ default_value="waymo_perception.launch.xml",
+ description="Launch file for testing perception stack",
+ )
+
+ vehicle_model_launch_arg = DeclareLaunchArgument(
+ "vehicle_model",
+ default_value="sample_vehicle",
+ description="",
+ )
+
+ sensor_model_launch_arg = DeclareLaunchArgument(
+ "sensor_model",
+ default_value="sample_sensor_kit",
+ description="",
+ )
+
+ benchmark_node = Node(
+ package="perception_benchmark_tool",
+ name="benchmark_node",
+ executable="benchmark_node",
+ output="screen",
+ parameters=[
+ {
+ "result_path": LaunchConfiguration("result_path"),
+ "benchmark_frame": LaunchConfiguration("benchmark_frame"),
+ }
+ ],
+ )
+
+ waymo_player_node = Node(
+ package="perception_benchmark_tool",
+ name="waymo_player_node",
+ executable="waymo_player_node",
+ output="screen",
+ parameters=[
+ {
+ "dataset_path": LaunchConfiguration("dataset_path"),
+ "use_camera": LaunchConfiguration("use_camera"),
+ }
+ ],
+ )
+
+ autoware_workflow_runner_node = Node(
+ package="perception_benchmark_tool",
+ name="autoware_workflow_runner_node",
+ executable="autoware_workflow_runner_node",
+ output="screen",
+ parameters=[
+ {
+ "launch_file": LaunchConfiguration("launch_file"),
+ "vehicle_model": LaunchConfiguration("vehicle_model"),
+ "sensor_model": LaunchConfiguration("sensor_model"),
+ }
+ ],
+ )
+
+ return LaunchDescription(
+ [
+ dataset_path_launch_arg,
+ use_camera_launch_arg,
+ benchmark_frame_launch_arg,
+ result_path_launch_arg,
+ launch_file_launch_arg,
+ vehicle_model_launch_arg,
+ sensor_model_launch_arg,
+ benchmark_node,
+ waymo_player_node,
+ autoware_workflow_runner_node,
+ ]
+ )
diff --git a/launch/pointcloud_preprocessor.launch.py b/launch/pointcloud_preprocessor.launch.py
new file mode 100644
index 0000000..c0c0f26
--- /dev/null
+++ b/launch/pointcloud_preprocessor.launch.py
@@ -0,0 +1,107 @@
+# Copyright 2020 Tier IV, Inc. All rights reserved.
+#
+# Licensed under the Apache License, Version 2.0 (the "License");
+# you may not use this file except in compliance with the License.
+# You may obtain a copy of the License at
+#
+# http://www.apache.org/licenses/LICENSE-2.0
+#
+# Unless required by applicable law or agreed to in writing, software
+# distributed under the License is distributed on an "AS IS" BASIS,
+# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
+# See the License for the specific language governing permissions and
+# limitations under the License.
+
+
+import launch
+from launch.actions import DeclareLaunchArgument
+from launch.actions import OpaqueFunction
+from launch.actions import SetLaunchConfiguration
+from launch.conditions import IfCondition
+from launch.conditions import UnlessCondition
+from launch.substitutions import LaunchConfiguration
+from launch_ros.actions import ComposableNodeContainer
+from launch_ros.actions import LoadComposableNodes
+from launch_ros.descriptions import ComposableNode
+
+
+def launch_setup(context, *args, **kwargs):
+
+ # set concat filter as a component
+ concat_component = ComposableNode(
+ package="pointcloud_preprocessor",
+ plugin="pointcloud_preprocessor::PointCloudConcatenateDataSynchronizerComponent",
+ name="concatenate_data",
+ remappings=[("output", "/sensing/lidar/concatenated/pointcloud")],
+ parameters=[
+ {
+ "input_topics": [
+ "/point_cloud/front_lidar",
+ "/point_cloud/rear_lidar",
+ "/point_cloud/side_left_lidar",
+ "/point_cloud/side_right_lidar",
+ "/point_cloud/top_lidar",
+ ],
+ "output_frame": LaunchConfiguration("base_frame"),
+ }
+ ],
+ extra_arguments=[{"use_intra_process_comms": LaunchConfiguration("use_intra_process")}],
+ )
+
+ # set container to run all required components in the same process
+ container = ComposableNodeContainer(
+ name=LaunchConfiguration("container_name"),
+ namespace="",
+ package="rclcpp_components",
+ executable=LaunchConfiguration("container_executable"),
+ composable_node_descriptions=[],
+ condition=UnlessCondition(LaunchConfiguration("use_pointcloud_container")),
+ output="screen",
+ )
+
+ target_container = (
+ container
+ if UnlessCondition(LaunchConfiguration("use_pointcloud_container")).evaluate(context)
+ else LaunchConfiguration("container_name")
+ )
+
+ # load concat or passthrough filter
+ concat_loader = LoadComposableNodes(
+ composable_node_descriptions=[concat_component],
+ target_container=target_container,
+ condition=IfCondition(LaunchConfiguration("use_concat_filter")),
+ )
+
+ return [container, concat_loader]
+
+
+def generate_launch_description():
+
+ launch_arguments = []
+
+ def add_launch_arg(name: str, default_value=None):
+ launch_arguments.append(DeclareLaunchArgument(name, default_value=default_value))
+
+ add_launch_arg("base_frame", "base_link")
+ add_launch_arg("use_multithread", "False")
+ add_launch_arg("use_intra_process", "False")
+ add_launch_arg("use_pointcloud_container", "False")
+ add_launch_arg("container_name", "pointcloud_preprocessor_container")
+
+ set_container_executable = SetLaunchConfiguration(
+ "container_executable",
+ "component_container",
+ condition=UnlessCondition(LaunchConfiguration("use_multithread")),
+ )
+
+ set_container_mt_executable = SetLaunchConfiguration(
+ "container_executable",
+ "component_container_mt",
+ condition=IfCondition(LaunchConfiguration("use_multithread")),
+ )
+
+ return launch.LaunchDescription(
+ launch_arguments
+ + [set_container_executable, set_container_mt_executable]
+ + [OpaqueFunction(function=launch_setup)]
+ )
diff --git a/launch/waymo_perception.launch.xml b/launch/waymo_perception.launch.xml
new file mode 100644
index 0000000..328fbd1
--- /dev/null
+++ b/launch/waymo_perception.launch.xml
@@ -0,0 +1,48 @@
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
diff --git a/package.xml b/package.xml
new file mode 100644
index 0000000..0edae5b
--- /dev/null
+++ b/package.xml
@@ -0,0 +1,31 @@
+
+
+
+ perception_benchmark_tool
+ 0.0.0
+ This package benchmark Autoware perception stack on Waymo dataset
+ Kaan Colak
+ Apache License 2.0
+
+ ament_copyright
+ ament_flake8
+ ament_pep257
+ python3-pytest
+
+ autoware_auto_perception_msgs
+ global_parameter_loader
+ rviz2
+ tier4_perception_msgs
+
+ cv_bridge
+ geometry_msgs
+ std_srvs
+ tf2
+ tf2_geometry_msgs
+ tf2_ros
+ tf_transformations
+
+
+ ament_python
+
+
diff --git a/perception_benchmark_tool/__init__.py b/perception_benchmark_tool/__init__.py
new file mode 100644
index 0000000..e69de29
diff --git a/perception_benchmark_tool/autoware_workflow_runner_node.py b/perception_benchmark_tool/autoware_workflow_runner_node.py
new file mode 100644
index 0000000..95a4d7c
--- /dev/null
+++ b/perception_benchmark_tool/autoware_workflow_runner_node.py
@@ -0,0 +1,154 @@
+# Copyright 2018 Autoware Foundation. All rights reserved.
+#
+# Licensed under the Apache License, Version 2.0 (the "License");
+# you may not use this file except in compliance with the License.
+# You may obtain a copy of the License at
+#
+# http://www.apache.org/licenses/LICENSE-2.0
+#
+# Unless required by applicable law or agreed to in writing, software
+# distributed under the License is distributed on an "AS IS" BASIS,
+# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
+# See the License for the specific language governing permissions and
+# limitations under the License.
+
+import signal
+from subprocess import DEVNULL
+from subprocess import Popen
+
+from autoware_auto_perception_msgs.msg import TrackedObjects
+import psutil
+import rclpy
+from rclpy.node import Node
+from std_msgs.msg import Bool
+from std_srvs.srv import Trigger
+
+
+class RunnerNode(Node):
+ def __init__(self):
+ super().__init__("autoware_workflow_runner_node")
+
+ self.declare_parameter("launch_file", "")
+ self.launch_file = self.get_parameter("launch_file").get_parameter_value().string_value
+
+ self.declare_parameter("vehicle_model", "")
+ self.vehicle_model = self.get_parameter("vehicle_model").get_parameter_value().string_value
+
+ self.declare_parameter("sensor_model", "")
+ self.sensor_model = self.get_parameter("sensor_model").get_parameter_value().string_value
+
+ self.autoware_pid = None
+ self.timer_subs_checker = None
+
+ self.client_read_dataset_futures = []
+ self.client_read_dataset = self.create_client(Trigger, "read_current_segment")
+ while not self.client_read_dataset.wait_for_service(timeout_sec=3.0):
+ self.get_logger().info("service not available, waiting again...")
+
+ self.client_read_frame_futures = []
+ self.client_read_dataset_frame = self.create_client(Trigger, "send_frame")
+ while not self.client_read_dataset_frame.wait_for_service(timeout_sec=3.0):
+ self.get_logger().info("service not available, waiting again...")
+
+ self.sub_segment_finished = self.create_subscription(
+ Bool, "segment_finished", self.segment_finished_callback, 1
+ )
+
+ self.sub_tracking = self.create_subscription(
+ TrackedObjects,
+ "/perception/object_recognition/tracking/objects",
+ self.tracked_objects_callback,
+ 10,
+ )
+
+ self.read_dataset_request()
+
+ def spin(self):
+
+ while rclpy.ok():
+ rclpy.spin_once(self)
+
+ incomplete_read_dataset_futures = []
+ for f in self.client_read_dataset_futures:
+ if f.done():
+ response = f.result()
+ if response.success:
+ self.autoware_pid = self.run_autoware()
+ self.timer_subs_checker = self.create_timer(
+ 2, self.wait_until_autoware_subs_ready
+ )
+ else:
+ incomplete_read_dataset_futures.append(f)
+
+ self.client_read_dataset_futures = incomplete_read_dataset_futures
+
+ incomplete_send_frame_futures = []
+ for f in self.client_read_frame_futures:
+ if f.done():
+ response = f.result()
+ else:
+ incomplete_send_frame_futures.append(f)
+
+ self.client_read_frame_futures = incomplete_send_frame_futures
+
+ def read_dataset_request(self):
+ req = Trigger.Request()
+ self.client_read_dataset_futures.append(self.client_read_dataset.call_async(req))
+
+ def read_frame_request(self):
+ req = Trigger.Request()
+ self.client_read_frame_futures.append(self.client_read_dataset_frame.call_async(req))
+
+ def segment_finished_callback(self, ready):
+ self.get_logger().info("Autoware is being killed. ")
+ self.kill_autoware(self.autoware_pid)
+ self.read_dataset_request()
+
+ def wait_until_autoware_subs_ready(self):
+
+ self.get_logger().info("Waiting for Autoware's subscriber to be ready")
+
+ if self.check_lidar_model_ready():
+ self.get_logger().info("Autoware ready.")
+ self.read_frame_request()
+ self.destroy_timer(self.timer_subs_checker)
+
+ def run_autoware(self):
+ cmd = (
+ "ros2 launch perception_benchmark_tool "
+ + self.launch_file
+ + " vehicle_model:="
+ + self.vehicle_model
+ + " sensor_model:="
+ + self.sensor_model
+ )
+ launch_process = Popen(cmd, text=False, shell=True, stdout=DEVNULL)
+ return launch_process.pid
+
+ def kill_autoware(self, parent_pid, sig=signal.SIGTERM):
+ try:
+ parent = psutil.Process(parent_pid)
+ except psutil.NoSuchProcess:
+ return
+ children = parent.children(recursive=True)
+ for process in children:
+ process.send_signal(sig)
+
+ def check_lidar_model_ready(self):
+ centerpoint_ready = self.count_publishers(
+ "/perception/object_recognition/detection/centerpoint/objects"
+ )
+ apollo_ready = self.count_publishers(
+ "/perception/object_recognition/detection/apollo/labeled_clusters"
+ )
+ return bool(centerpoint_ready or apollo_ready)
+
+ def tracked_objects_callback(self, tracked_objects):
+ self.read_frame_request()
+
+
+def main(args=None):
+ rclpy.init(args=args)
+ autoware_workflow_runner_node = RunnerNode()
+ autoware_workflow_runner_node.spin()
+ rclpy.shutdown()
diff --git a/perception_benchmark_tool/benchmark_node.py b/perception_benchmark_tool/benchmark_node.py
new file mode 100644
index 0000000..36689aa
--- /dev/null
+++ b/perception_benchmark_tool/benchmark_node.py
@@ -0,0 +1,231 @@
+# Copyright 2018 Autoware Foundation. All rights reserved.
+#
+# Licensed under the Apache License, Version 2.0 (the "License");
+# you may not use this file except in compliance with the License.
+# You may obtain a copy of the License at
+#
+# http://www.apache.org/licenses/LICENSE-2.0
+#
+# Unless required by applicable law or agreed to in writing, software
+# distributed under the License is distributed on an "AS IS" BASIS,
+# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
+# See the License for the specific language governing permissions and
+# limitations under the License.
+
+import os
+
+from autoware_auto_perception_msgs.msg import ObjectClassification
+from autoware_auto_perception_msgs.msg import TrackedObjects
+from geometry_msgs.msg import PoseStamped
+from message_filters import Subscriber
+from message_filters import TimeSynchronizer
+from perception_benchmark_tool.benchmark_tools.math_utils import euler_from_quaternion
+from perception_benchmark_tool.benchmark_tools.ros_utils import do_transform_pose_stamped
+import rclpy
+from rclpy.node import Node
+from std_msgs.msg import Bool
+from tf2_ros import TransformException
+from tf2_ros.buffer import Buffer
+from tf2_ros.transform_listener import TransformListener
+from waymo_open_dataset import label_pb2
+from waymo_open_dataset.protos import metrics_pb2
+
+
+def generate_context_name():
+ generate_context_name.__dict__.setdefault("count", 0)
+ generate_context_name.count += 1
+ return "context_" + str(generate_context_name.count)
+
+
+class PerceptionBenchmark(Node):
+ def __init__(self):
+ super().__init__("benchmark_node")
+
+ self.declare_parameter("benchmark_frame", "base_link")
+ self.benchmark_frame = (
+ self.get_parameter("benchmark_frame").get_parameter_value().string_value
+ )
+
+ self.declare_parameter("result_path", "")
+ self.result_path = self.get_parameter("result_path").get_parameter_value().string_value
+
+ if not os.path.exists(self.result_path):
+ os.makedirs(self.result_path)
+
+ self.prediction_result_path = self.result_path + "/prediction_result.bin"
+ self.gt_path = self.result_path + "/ground_truth_result.bin"
+
+ self.tf_buffer = Buffer()
+ self.tf_listener = TransformListener(buffer=self.tf_buffer, node=self, spin_thread=True)
+
+ self.sub_tracking = Subscriber(
+ self, TrackedObjects, "/perception/object_recognition/tracking/objects"
+ )
+
+ self.sub_tracking_gt = Subscriber(self, TrackedObjects, "/gt_objects")
+ self.time_sync = TimeSynchronizer([self.sub_tracking, self.sub_tracking_gt], 10)
+ self.time_sync.registerCallback(self.tracking_benchmark_callback)
+
+ self.sub_scene_finished = self.create_subscription(
+ Bool, "segment_finished", self.scene_changed_callback, 1
+ )
+
+ self.context_name = generate_context_name()
+
+ def tracking_benchmark_callback(self, tracking_objects, gt_tracking_objects):
+
+ prediction_proto_objects = metrics_pb2.Objects()
+ gt_proto_objects = metrics_pb2.Objects()
+
+ objects_stamp = tracking_objects.header.stamp
+ waymo_timestamp_as_micro = objects_stamp.sec * 1000000 + objects_stamp.nanosec / 1000
+
+ if tracking_objects.header.frame_id != self.benchmark_frame:
+ tracking_objects = self.transform_tracked_objects(tracking_objects)
+
+ # Convert tracked obejct to Waymo Proto objects
+ for tracked_object in tracking_objects.objects:
+
+ tracked_object_waymo = metrics_pb2.Object()
+ tracked_object_waymo.context_name = self.context_name
+ tracked_object_waymo.frame_timestamp_micros = int(waymo_timestamp_as_micro)
+
+ bbox_waymo = label_pb2.Label.Box()
+ bbox_waymo.center_x = tracked_object.kinematics.pose_with_covariance.pose.position.x
+ bbox_waymo.center_y = tracked_object.kinematics.pose_with_covariance.pose.position.y
+ bbox_waymo.center_z = tracked_object.kinematics.pose_with_covariance.pose.position.z
+ bbox_waymo.length = tracked_object.shape.dimensions.x
+ bbox_waymo.width = tracked_object.shape.dimensions.y
+ bbox_waymo.height = tracked_object.shape.dimensions.z
+
+ roll, pitch, yaw = euler_from_quaternion(
+ tracked_object.kinematics.pose_with_covariance.pose.orientation.x,
+ tracked_object.kinematics.pose_with_covariance.pose.orientation.y,
+ tracked_object.kinematics.pose_with_covariance.pose.orientation.z,
+ tracked_object.kinematics.pose_with_covariance.pose.orientation.w,
+ )
+
+ bbox_waymo.heading = yaw
+ tracked_object_waymo.object.box.CopyFrom(bbox_waymo)
+ tracked_object_waymo.score = 0.5
+ if tracked_object.classification[0].label == ObjectClassification.CAR:
+ tracked_object_waymo.object.type = label_pb2.Label.TYPE_VEHICLE
+ elif tracked_object.classification[0].label == ObjectClassification.PEDESTRIAN:
+ tracked_object_waymo.object.type = label_pb2.Label.TYPE_PEDESTRIAN
+ elif tracked_object.classification[0].label == ObjectClassification.BICYCLE:
+ tracked_object_waymo.object.type = label_pb2.Label.TYPE_CYCLIST
+ else:
+ continue
+
+ object_track_id = "".join(
+ str(tracked_object.object_id.uuid[e])
+ for e in range(0, len(tracked_object.object_id.uuid))
+ )
+ tracked_object_waymo.object.id = str(object_track_id)
+
+ prediction_proto_objects.objects.append(tracked_object_waymo)
+
+ with open(self.prediction_result_path, "ab+") as pred_file:
+ pred_file.write(prediction_proto_objects.SerializeToString())
+
+ if gt_tracking_objects.header.frame_id != self.benchmark_frame:
+ gt_tracking_objects = self.transform_tracked_objects(tracking_objects)
+
+ # Convert ground truth obejct to Waymo Proto objects
+ for gt_object in gt_tracking_objects.objects:
+
+ gt_waymo = metrics_pb2.Object()
+ gt_waymo.context_name = self.context_name
+ gt_waymo.frame_timestamp_micros = int(waymo_timestamp_as_micro)
+
+ bbox_waymo = label_pb2.Label.Box()
+ bbox_waymo.center_x = gt_object.kinematics.pose_with_covariance.pose.position.x
+ bbox_waymo.center_y = gt_object.kinematics.pose_with_covariance.pose.position.y
+ bbox_waymo.center_z = gt_object.kinematics.pose_with_covariance.pose.position.z
+ bbox_waymo.length = gt_object.shape.dimensions.x
+ bbox_waymo.width = gt_object.shape.dimensions.y
+ bbox_waymo.height = gt_object.shape.dimensions.z
+
+ roll, pitch, yaw = euler_from_quaternion(
+ gt_object.kinematics.pose_with_covariance.pose.orientation.x,
+ gt_object.kinematics.pose_with_covariance.pose.orientation.y,
+ gt_object.kinematics.pose_with_covariance.pose.orientation.z,
+ gt_object.kinematics.pose_with_covariance.pose.orientation.w,
+ )
+
+ bbox_waymo.heading = yaw
+ gt_waymo.object.box.CopyFrom(bbox_waymo)
+ gt_waymo.score = 0.5
+ if gt_object.classification[0].label == ObjectClassification.CAR:
+ gt_waymo.object.type = label_pb2.Label.TYPE_VEHICLE
+ elif gt_object.classification[0].label == ObjectClassification.PEDESTRIAN:
+ gt_waymo.object.type = label_pb2.Label.TYPE_PEDESTRIAN
+ elif gt_object.classification[0].label == ObjectClassification.BICYCLE:
+ gt_waymo.object.type = label_pb2.Label.TYPE_CYCLIST
+ else:
+ continue
+
+ object_track_id = "".join(
+ str(gt_object.object_id.uuid[e]) for e in range(0, len(gt_object.object_id.uuid))
+ )
+ gt_waymo.object.id = str(object_track_id)
+
+ gt_proto_objects.objects.append(gt_waymo)
+
+ with open(self.gt_path, "ab+") as gt_file:
+ gt_file.write(gt_proto_objects.SerializeToString())
+
+ def transform_tracked_objects(self, tracked_objects):
+
+ transformed_tracked_objects = TrackedObjects()
+ transformed_tracked_objects.header.stamp = tracked_objects.header.stamp
+ transformed_tracked_objects.header.frame_id = self.benchmark_frame
+
+ try:
+ trans = self.tf_buffer.lookup_transform(
+ self.benchmark_frame,
+ tracked_objects.header.frame_id,
+ tracked_objects.header.stamp,
+ rclpy.duration.Duration(seconds=1),
+ )
+
+ except TransformException as ex:
+ self.get_logger().info("Could not find transform:" + str(ex))
+ return None
+
+ for tracked_object in tracked_objects.objects:
+ tracked_objected_map_pose = PoseStamped()
+ tracked_objected_map_pose.header.stamp = tracked_objects.header.stamp
+ tracked_objected_map_pose.header.frame_id = tracked_objects.header.frame_id
+ tracked_objected_map_pose.pose.position = (
+ tracked_object.kinematics.pose_with_covariance.pose.position
+ )
+ tracked_objected_map_pose.pose.orientation = (
+ tracked_object.kinematics.pose_with_covariance.pose.orientation
+ )
+
+ object_transformed = do_transform_pose_stamped(tracked_objected_map_pose, trans)
+
+ transformed_tracked_object = tracked_object
+ transformed_tracked_object.kinematics.pose_with_covariance.pose.orientation = (
+ object_transformed.pose.orientation
+ )
+ transformed_tracked_object.kinematics.pose_with_covariance.pose.position = (
+ object_transformed.pose.position
+ )
+
+ transformed_tracked_objects.objects.append(transformed_tracked_object)
+
+ return transformed_tracked_objects
+
+ def scene_changed_callback(self, read_dataset):
+ self.context_name = generate_context_name()
+ self.tf_buffer.clear()
+ self.tf_listener = TransformListener(buffer=self.tf_buffer, node=self, spin_thread=True)
+
+
+def main(args=None):
+ rclpy.init(args=args)
+ benchmark_node = PerceptionBenchmark()
+ rclpy.spin(benchmark_node)
+ rclpy.shutdown()
diff --git a/perception_benchmark_tool/benchmark_tools/__init__.py b/perception_benchmark_tool/benchmark_tools/__init__.py
new file mode 100644
index 0000000..c40d127
--- /dev/null
+++ b/perception_benchmark_tool/benchmark_tools/__init__.py
@@ -0,0 +1,2 @@
+from .math_utils import *
+from .ros_utils import *
\ No newline at end of file
diff --git a/perception_benchmark_tool/benchmark_tools/datasets/__init__.py b/perception_benchmark_tool/benchmark_tools/datasets/__init__.py
new file mode 100644
index 0000000..21fbd49
--- /dev/null
+++ b/perception_benchmark_tool/benchmark_tools/datasets/__init__.py
@@ -0,0 +1 @@
+from .waymo_dataset import *
\ No newline at end of file
diff --git a/perception_benchmark_tool/benchmark_tools/datasets/waymo_dataset/__init__.py b/perception_benchmark_tool/benchmark_tools/datasets/waymo_dataset/__init__.py
new file mode 100644
index 0000000..86b2683
--- /dev/null
+++ b/perception_benchmark_tool/benchmark_tools/datasets/waymo_dataset/__init__.py
@@ -0,0 +1,6 @@
+from .waymo_dataset import WaymoDataset
+from .waymo_decode_data import *
+
+__all__ = [
+ "WaymoDataset",
+]
diff --git a/perception_benchmark_tool/benchmark_tools/datasets/waymo_dataset/waymo_dataset.py b/perception_benchmark_tool/benchmark_tools/datasets/waymo_dataset/waymo_dataset.py
new file mode 100644
index 0000000..d378c23
--- /dev/null
+++ b/perception_benchmark_tool/benchmark_tools/datasets/waymo_dataset/waymo_dataset.py
@@ -0,0 +1,55 @@
+# Copyright 2018 Autoware Foundation. All rights reserved.
+#
+# Licensed under the Apache License, Version 2.0 (the "License");
+# you may not use this file except in compliance with the License.
+# You may obtain a copy of the License at
+#
+# http://www.apache.org/licenses/LICENSE-2.0
+#
+# Unless required by applicable law or agreed to in writing, software
+# distributed under the License is distributed on an "AS IS" BASIS,
+# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
+# See the License for the specific language governing permissions and
+# limitations under the License.
+
+import os
+
+from perception_benchmark_tool.benchmark_tools.datasets.waymo_dataset.waymo_decode_data import (
+ extract_dataset_from_tfrecord,
+)
+
+
+class WaymoDataset:
+ def __init__(self, segment_path):
+
+ self.lidars_tf = {}
+ self.cameras_tf = {}
+
+ self.segment_path = os.path.join(segment_path)
+
+ (
+ self.dataset_scene_by_scene,
+ self.lidars_tf,
+ self.cameras_tf,
+ ) = extract_dataset_from_tfrecord(self.segment_path)
+
+ self.frame_counter = 0
+
+ def get_lidars_static_tf(self):
+ return self.lidars_tf
+
+ def get_cameras_static_tf(self):
+ return self.cameras_tf
+
+ def get_scene_from_dataset(self):
+ self.frame_counter += 1
+ return self.dataset_scene_by_scene[self.frame_counter - 1]
+
+ def is_finished(self):
+ if self.frame_counter < len(self.dataset_scene_by_scene):
+ return False
+ else:
+ return True
+
+ def get_all_dataset(self):
+ return self.dataset_scene_by_scene
diff --git a/perception_benchmark_tool/benchmark_tools/datasets/waymo_dataset/waymo_decode_data.py b/perception_benchmark_tool/benchmark_tools/datasets/waymo_dataset/waymo_decode_data.py
new file mode 100644
index 0000000..4fea813
--- /dev/null
+++ b/perception_benchmark_tool/benchmark_tools/datasets/waymo_dataset/waymo_decode_data.py
@@ -0,0 +1,260 @@
+# Copyright 2018 Autoware Foundation. All rights reserved.
+#
+# Licensed under the Apache License, Version 2.0 (the "License");
+# you may not use this file except in compliance with the License.
+# You may obtain a copy of the License at
+#
+# http://www.apache.org/licenses/LICENSE-2.0
+#
+# Unless required by applicable law or agreed to in writing, software
+# distributed under the License is distributed on an "AS IS" BASIS,
+# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
+# See the License for the specific language governing permissions and
+# limitations under the License.
+
+import numpy as np
+import tensorflow as tf
+from waymo_open_dataset import dataset_pb2 as open_dataset
+from waymo_open_dataset.utils import range_image_utils
+from waymo_open_dataset.utils import transform_utils
+
+
+def decode_camera_calibration(frame):
+ camera_calibrations = []
+
+ for camera_calibration in frame.context.camera_calibrations:
+ camera_name = open_dataset.CameraName.Name.Name(camera_calibration.name)
+ extrinsic = np.array(camera_calibration.extrinsic.transform).reshape(4, 4)
+ cam_intrinsic = np.array([[0, 0, 0, 0], [0, 0, 0, 0], [0, 0, 0, 0]])
+ cam_intrinsic[0, 0] = camera_calibration.intrinsic[0]
+ cam_intrinsic[1, 1] = camera_calibration.intrinsic[1]
+ cam_intrinsic[0, 2] = camera_calibration.intrinsic[2]
+ cam_intrinsic[1, 2] = camera_calibration.intrinsic[3]
+ cam_intrinsic[2, 2] = 1
+ width = camera_calibration.width
+ height = camera_calibration.height
+
+ # Swap the axes around
+ axes_transformation = np.array([[0, -1, 0, 0], [0, 0, -1, 0], [1, 0, 0, 0], [0, 0, 0, 1]])
+
+ vehicle_to_image = np.matmul(
+ cam_intrinsic, np.matmul(axes_transformation, np.linalg.inv(extrinsic))
+ )
+
+ camera_info = {
+ "cam_to_vehicle": extrinsic,
+ "cam_intrinsic": cam_intrinsic,
+ "width": width,
+ "height": height,
+ "vehicle_to_image": vehicle_to_image,
+ }
+
+ camera_calibration = [camera_name, camera_info]
+ camera_calibrations.append(camera_calibration)
+
+ return camera_calibrations
+
+
+def get_decoded_point_cloud(frame):
+ range_images = {}
+ camera_projections = {}
+ range_image_top_pose = None
+
+ for laser in frame.lasers:
+
+ if len(laser.ri_return1.range_image_compressed) > 0:
+ range_image_str_tensor = tf.io.decode_compressed(
+ laser.ri_return1.range_image_compressed, "ZLIB"
+ )
+ ri = open_dataset.MatrixFloat()
+ ri.ParseFromString(bytearray(range_image_str_tensor.numpy()))
+ range_images[laser.name] = [ri]
+
+ if laser.name == open_dataset.LaserName.TOP:
+ range_image_top_pose_str_tensor = tf.io.decode_compressed(
+ laser.ri_return1.range_image_pose_compressed, "ZLIB"
+ )
+ range_image_top_pose = open_dataset.MatrixFloat()
+ range_image_top_pose.ParseFromString(
+ bytearray(range_image_top_pose_str_tensor.numpy())
+ )
+
+ camera_projection_str_tensor = tf.io.decode_compressed(
+ laser.ri_return1.camera_projection_compressed, "ZLIB"
+ )
+ cp = open_dataset.MatrixInt32()
+ cp.ParseFromString(bytearray(camera_projection_str_tensor.numpy()))
+ camera_projections[laser.name] = [cp]
+
+ if len(laser.ri_return2.range_image_compressed) > 0:
+ range_image_str_tensor = tf.io.decode_compressed(
+ laser.ri_return2.range_image_compressed, "ZLIB"
+ )
+ ri = open_dataset.MatrixFloat()
+ ri.ParseFromString(bytearray(range_image_str_tensor.numpy()))
+ range_images[laser.name].append(ri)
+
+ camera_projection_str_tensor = tf.io.decode_compressed(
+ laser.ri_return2.camera_projection_compressed, "ZLIB"
+ )
+ cp = open_dataset.MatrixInt32()
+ cp.ParseFromString(bytearray(camera_projection_str_tensor.numpy()))
+ camera_projections[laser.name].append(cp)
+
+ calibrations = sorted(frame.context.laser_calibrations, key=lambda c: c.name)
+ points = []
+
+ frame_pose = tf.convert_to_tensor(np.reshape(np.array(frame.pose.transform), [4, 4]))
+ # [H, W, 6]
+ range_image_top_pose_tensor = tf.reshape(
+ tf.convert_to_tensor(range_image_top_pose.data), range_image_top_pose.shape.dims
+ )
+ # [H, W, 3, 3]
+ range_image_top_pose_tensor_rotation = transform_utils.get_rotation_matrix(
+ range_image_top_pose_tensor[..., 0],
+ range_image_top_pose_tensor[..., 1],
+ range_image_top_pose_tensor[..., 2],
+ )
+ range_image_top_pose_tensor_translation = range_image_top_pose_tensor[..., 3:]
+ range_image_top_pose_tensor = transform_utils.get_transform(
+ range_image_top_pose_tensor_rotation, range_image_top_pose_tensor_translation
+ )
+ for c in calibrations:
+ range_image = range_images[c.name][0]
+
+ if len(c.beam_inclinations) == 0:
+ beam_inclinations = range_image_utils.compute_inclination(
+ tf.constant([c.beam_inclination_min, c.beam_inclination_max]),
+ height=range_image.shape.dims[0],
+ )
+ else:
+ beam_inclinations = tf.constant(c.beam_inclinations)
+
+ beam_inclinations = tf.reverse(beam_inclinations, axis=[-1])
+ extrinsic = np.reshape(np.array(c.extrinsic.transform), [4, 4])
+
+ range_image_tensor = tf.reshape(
+ tf.convert_to_tensor(range_image.data), range_image.shape.dims
+ )
+ pixel_pose_local = None
+ frame_pose_local = None
+
+ if c.name == open_dataset.LaserName.TOP:
+ pixel_pose_local = range_image_top_pose_tensor
+ pixel_pose_local = tf.expand_dims(pixel_pose_local, axis=0)
+ frame_pose_local = tf.expand_dims(frame_pose, axis=0)
+ range_image_mask = range_image_tensor[..., 0] > 0
+ range_image_cartesian = range_image_utils.extract_point_cloud_from_range_image(
+ tf.expand_dims(range_image_tensor[..., 0], axis=0),
+ tf.expand_dims(extrinsic, axis=0),
+ tf.expand_dims(tf.convert_to_tensor(beam_inclinations), axis=0),
+ pixel_pose=pixel_pose_local,
+ frame_pose=frame_pose_local,
+ )
+
+ range_image_cartesian = tf.squeeze(range_image_cartesian, axis=0)
+ points_tensor = tf.gather_nd(range_image_cartesian, tf.where(range_image_mask))
+
+ laser = [open_dataset.LaserName.Name.Name(c.name), points_tensor.numpy()]
+ points.append(laser)
+
+ return points
+
+
+def decode_static_tf(frame):
+ lidars_transforms = {}
+ cameras_transforms = {}
+
+ for laser_calibration in frame.context.laser_calibrations:
+ laser_name = open_dataset.LaserName.Name.Name(laser_calibration.name)
+ extrinsic = np.array(laser_calibration.extrinsic.transform).reshape((4, 4))
+ lidars_transforms[f"{laser_name}_LASER_EXTRINSIC"] = extrinsic
+ for camera_calibration in frame.context.camera_calibrations:
+ camera_name = open_dataset.CameraName.Name.Name(camera_calibration.name)
+ extrinsic = (np.array(camera_calibration.extrinsic.transform)).reshape((4, 4))
+ cameras_transforms[f"{camera_name}_CAM_EXTRINSIC"] = extrinsic
+
+ return lidars_transforms, cameras_transforms
+
+
+def decode_vehicle_pose(frame, frame_id, trans_t_zero_inverse):
+ mat_trans_frame = np.array(
+ [
+ (
+ frame.pose.transform[0],
+ frame.pose.transform[1],
+ frame.pose.transform[2],
+ frame.pose.transform[3],
+ ),
+ (
+ frame.pose.transform[4],
+ frame.pose.transform[5],
+ frame.pose.transform[6],
+ frame.pose.transform[7],
+ ),
+ (
+ frame.pose.transform[8],
+ frame.pose.transform[9],
+ frame.pose.transform[10],
+ frame.pose.transform[11],
+ ),
+ (0, 0, 0, 1),
+ ]
+ )
+ # Define T inverse of odom:
+ if frame_id == 0:
+ trans_t_zero_inverse = np.linalg.inv(mat_trans_frame)
+
+ mat_trans_frame = np.dot(trans_t_zero_inverse, mat_trans_frame)
+ return mat_trans_frame, trans_t_zero_inverse
+
+
+def extract_dataset_from_tfrecord(path):
+ gpus = tf.config.list_physical_devices("GPU")
+ if gpus:
+ try:
+ # Currently, memory growth needs to be the same across GPUs
+ for gpu in gpus:
+ tf.config.experimental.set_memory_growth(gpu, True)
+ logical_gpus = tf.config.list_logical_devices("GPU")
+ print(len(gpus), "Physical GPUs,", len(logical_gpus), "Logical GPUs")
+ except RuntimeError as e:
+ # Memory growth must be set before GPUs have been initialized
+ print(e)
+
+ dataset = tf.data.TFRecordDataset(path, compression_type="")
+ extracted_dataset = []
+ trans_t_zero_inverse = np.array([0])
+
+ lidars_transforms = {}
+ cameras_transforms = {}
+
+ for frame_id, data in enumerate(dataset):
+ data_dict = {}
+ frame = open_dataset.Frame()
+ frame.ParseFromString(bytearray(data.numpy()))
+
+ if frame_id == 1:
+ lidars_transforms, cameras_transforms = decode_static_tf(frame)
+
+ for image in frame.images:
+ cam_name_str = open_dataset.CameraName.Name.Name(image.name)
+ data_dict[f"{cam_name_str}_IMAGE"] = tf.io.decode_jpeg(image.image).numpy()
+
+ for laser_name, point in get_decoded_point_cloud(frame):
+ data_dict[f"{laser_name}_LASER"] = point
+
+ for camera_name, camera_calibration in decode_camera_calibration(frame):
+ data_dict[f"{camera_name}_CAM_INFO"] = camera_calibration
+
+ data_dict["VEHICLE_POSE"], trans_t_zero_inverse = decode_vehicle_pose(
+ frame, frame_id, trans_t_zero_inverse
+ )
+
+ data_dict["TIMESTAMP_MICRO"] = frame.timestamp_micros
+ data_dict["FRAME_CONTEXT_NAME"] = frame.context.name
+ data_dict["GT_OBJECTS"] = frame.laser_labels
+
+ extracted_dataset.append(data_dict)
+
+ return extracted_dataset, lidars_transforms, cameras_transforms
diff --git a/perception_benchmark_tool/benchmark_tools/math_utils.py b/perception_benchmark_tool/benchmark_tools/math_utils.py
new file mode 100644
index 0000000..6556dba
--- /dev/null
+++ b/perception_benchmark_tool/benchmark_tools/math_utils.py
@@ -0,0 +1,156 @@
+# Copyright 2018 Autoware Foundation. All rights reserved.
+#
+# Licensed under the Apache License, Version 2.0 (the "License");
+# you may not use this file except in compliance with the License.
+# You may obtain a copy of the License at
+#
+# http://www.apache.org/licenses/LICENSE-2.0
+#
+# Unless required by applicable law or agreed to in writing, software
+# distributed under the License is distributed on an "AS IS" BASIS,
+# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
+# See the License for the specific language governing permissions and
+# limitations under the License.
+
+import math
+from typing import Iterable
+from typing import Optional
+from typing import Tuple
+
+from geometry_msgs.msg import TransformStamped
+import numpy as np
+
+
+def is_rotation_matrix(R):
+ r_transpose = np.transpose(R)
+ should_be_identity = np.dot(r_transpose, R)
+ identity = np.identity(3, dtype=R.dtype)
+ n = np.linalg.norm(identity - should_be_identity)
+ return n < 1e-6
+
+
+def rotation_matrix_to_euler_angles(R):
+ assert is_rotation_matrix(R)
+
+ sy = math.sqrt(R[0, 0] * R[0, 0] + R[1, 0] * R[1, 0])
+
+ singular = sy < 1e-6
+
+ if not singular:
+ x = math.atan2(R[2, 1], R[2, 2])
+ y = math.atan2(-R[2, 0], sy)
+ z = math.atan2(R[1, 0], R[0, 0])
+ else:
+ x = math.atan2(-R[1, 2], R[1, 1])
+ y = math.atan2(-R[2, 0], sy)
+ z = 0
+
+ return np.array([x, y, z])
+
+
+def euler_from_quaternion(x, y, z, w):
+ # Convert a quaternion into euler angles (roll, pitch, yaw),
+ # roll is rotation around x in radians (counterclockwise),
+ # pitch is rotation around y in radians (counterclockwise),
+ # yaw is rotation around z in radians (counterclockwise)
+
+ t0 = +2.0 * (w * x + y * z)
+ t1 = +1.0 - 2.0 * (x * x + y * y)
+ roll_x = math.atan2(t0, t1)
+
+ t2 = +2.0 * (w * y - z * x)
+ t2 = +1.0 if t2 > +1.0 else t2
+ t2 = -1.0 if t2 < -1.0 else t2
+ pitch_y = math.asin(t2)
+
+ t3 = +2.0 * (w * z + x * y)
+ t4 = +1.0 - 2.0 * (y * y + z * z)
+ yaw_z = math.atan2(t3, t4)
+
+ return roll_x, pitch_y, yaw_z # in radians
+
+
+def cart_to_homo(mat):
+ ret = np.eye(4)
+ if mat.shape == (3, 3):
+ ret[:3, :3] = mat
+ elif mat.shape == (3, 4):
+ ret[:3, :] = mat
+ else:
+ raise ValueError(mat.shape)
+ return ret
+
+
+def build_affine(
+ rotation: Optional[Iterable] = None, translation: Optional[Iterable] = None
+) -> np.ndarray:
+ affine = np.eye(4)
+ if rotation is not None:
+ affine[:3, :3] = get_mat_from_quat(np.asarray(rotation))
+ if translation is not None:
+ affine[:3, 3] = np.asarray(translation)
+ return affine
+
+
+def transform_to_affine(transform: TransformStamped) -> np.ndarray:
+ transform = transform.transform
+ transform_rotation_matrix = [
+ transform.rotation.w,
+ transform.rotation.x,
+ transform.rotation.y,
+ transform.rotation.z,
+ ]
+ transform_translation = [
+ transform.translation.x,
+ transform.translation.y,
+ transform.translation.z,
+ ]
+ return build_affine(transform_rotation_matrix, transform_translation)
+
+
+def get_mat_from_quat(quaternion: np.ndarray) -> np.ndarray:
+ Nq = np.sum(np.square(quaternion))
+ if Nq < np.finfo(np.float64).eps:
+ return np.eye(3)
+
+ XYZ = quaternion[1:] * 2.0 / Nq
+ wXYZ = XYZ * quaternion[0]
+ xXYZ = XYZ * quaternion[1]
+ yYZ = XYZ[1:] * quaternion[2]
+ zZ = XYZ[2] * quaternion[3]
+
+ return np.array(
+ [
+ [1.0 - (yYZ[0] + zZ), xXYZ[1] - wXYZ[2], xXYZ[2] + wXYZ[1]],
+ [xXYZ[1] + wXYZ[2], 1.0 - (xXYZ[0] + zZ), yYZ[1] - wXYZ[0]],
+ [xXYZ[2] - wXYZ[1], yYZ[1] + wXYZ[0], 1.0 - (xXYZ[0] + yYZ[0])],
+ ]
+ )
+
+
+def get_quat_from_mat(rot_mat: np.ndarray) -> np.ndarray:
+ # Decompose rotation matrix
+ Qxx, Qyx, Qzx, Qxy, Qyy, Qzy, Qxz, Qyz, Qzz = rot_mat.flat
+ # Create matrix
+ K = (
+ np.array(
+ [
+ [Qxx - Qyy - Qzz, 0, 0, 0],
+ [Qyx + Qxy, Qyy - Qxx - Qzz, 0, 0],
+ [Qzx + Qxz, Qzy + Qyz, Qzz - Qxx - Qyy, 0],
+ [Qyz - Qzy, Qzx - Qxz, Qxy - Qyx, Qxx + Qyy + Qzz],
+ ]
+ )
+ / 3.0
+ )
+ vals, vecs = np.linalg.eigh(K)
+ # Select largest eigenvector and reorder to w,x,y,z
+ q = vecs[[3, 0, 1, 2], np.argmax(vals)]
+ # Invert quaternion if w is negative (results in positive w)
+ if q[0] < 0:
+ q *= -1
+ return q
+
+
+def decompose_affine(affine: np.ndarray) -> Tuple[np.ndarray, np.ndarray]:
+ return get_quat_from_mat(affine[:3, :3]), affine[:3, 3]
diff --git a/perception_benchmark_tool/benchmark_tools/ros_utils.py b/perception_benchmark_tool/benchmark_tools/ros_utils.py
new file mode 100644
index 0000000..cf3f366
--- /dev/null
+++ b/perception_benchmark_tool/benchmark_tools/ros_utils.py
@@ -0,0 +1,123 @@
+# Copyright 2018 Autoware Foundation. All rights reserved.
+#
+# Licensed under the Apache License, Version 2.0 (the "License");
+# you may not use this file except in compliance with the License.
+# You may obtain a copy of the License at
+#
+# http://www.apache.org/licenses/LICENSE-2.0
+#
+# Unless required by applicable law or agreed to in writing, software
+# distributed under the License is distributed on an "AS IS" BASIS,
+# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
+# See the License for the specific language governing permissions and
+# limitations under the License.
+
+from cv_bridge import CvBridge
+from geometry_msgs.msg import Pose
+from geometry_msgs.msg import PoseStamped
+from geometry_msgs.msg import TransformStamped
+import numpy as np
+from perception_benchmark_tool.benchmark_tools.math_utils import build_affine
+from perception_benchmark_tool.benchmark_tools.math_utils import decompose_affine
+from perception_benchmark_tool.benchmark_tools.math_utils import rotation_matrix_to_euler_angles
+from perception_benchmark_tool.benchmark_tools.math_utils import transform_to_affine
+from sensor_msgs.msg import CameraInfo
+from sensor_msgs.msg import PointCloud2
+from sensor_msgs.msg import PointField
+import tf_transformations
+
+
+def create_point_cloud_mgs(frame_id, lidar_frame, ros_time):
+ msg = PointCloud2()
+ msg.header.stamp = ros_time.to_msg()
+ msg.header.frame_id = frame_id
+ msg.height = 1
+ msg.width = len(lidar_frame)
+ msg.point_step = 12
+ msg.row_step = 12 * msg.width
+ msg.is_dense = False
+ msg.fields = [
+ PointField(name="x", offset=0, datatype=PointField.FLOAT32, count=1),
+ PointField(name="y", offset=4, datatype=PointField.FLOAT32, count=1),
+ PointField(name="z", offset=8, datatype=PointField.FLOAT32, count=1),
+ ]
+ msg.is_bigendian = False
+ # We pass `data` directly to we avoid using `data` setter.
+ # Otherwise ROS2 converts data to `array.array` which slows down as it copies memory internally.
+ # Both, `bytearray` and `array.array`, implement Python buffer protocol, so we should not see unpredictable
+ # behavior.
+ # deepcode ignore W0212: Avoid conversion from `bytearray` to `array.array`.
+ msg._data = lidar_frame
+ return msg
+
+
+def create_image_msgs(frame_id, camera_frame, ros_time):
+ cv_bridge = CvBridge()
+ image_mgs = cv_bridge.cv2_to_imgmsg(cvim=camera_frame, encoding="rgb8")
+ image_mgs.header.stamp = ros_time.to_msg()
+ image_mgs.header.frame_id = frame_id
+ return image_mgs
+
+
+def create_camera_info(frame_id, camera_calibration, ros_time):
+ camera_info = CameraInfo()
+ camera_info.header.frame_id = frame_id
+ camera_info.header.stamp = ros_time.to_msg()
+ camera_info.width = camera_calibration["width"]
+ camera_info.height = camera_calibration["height"]
+ camera_info.p = (
+ np.array(camera_calibration["vehicle_to_image"]).astype(float).flatten().tolist()
+ )
+ return camera_info
+
+
+def make_transform_stamped(header_frame_id, child_frame_id, lidar_transform, ros_time):
+ rot_mat = lidar_transform[0:3, 0:3]
+ [rx, ry, rz] = rotation_matrix_to_euler_angles(rot_mat)
+ static_transform_stamped = TransformStamped()
+ static_transform_stamped.header.stamp = ros_time.to_msg()
+ static_transform_stamped.header.frame_id = header_frame_id
+ static_transform_stamped.child_frame_id = child_frame_id
+ static_transform_stamped.transform.translation.x = float(lidar_transform[0, 3])
+ static_transform_stamped.transform.translation.y = float(lidar_transform[1, 3])
+ static_transform_stamped.transform.translation.z = float(lidar_transform[2, 3])
+ quat = tf_transformations.quaternion_from_euler(rx, ry, rz)
+ static_transform_stamped.transform.rotation.x = quat[0]
+ static_transform_stamped.transform.rotation.y = quat[1]
+ static_transform_stamped.transform.rotation.z = quat[2]
+ static_transform_stamped.transform.rotation.w = quat[3]
+
+ return static_transform_stamped
+
+
+def do_transform_pose(pose: Pose, transform: TransformStamped) -> Pose:
+ quaternion, point = decompose_affine(
+ np.matmul(
+ transform_to_affine(transform),
+ build_affine(
+ translation=[pose.position.x, pose.position.y, pose.position.z],
+ rotation=[
+ pose.orientation.w,
+ pose.orientation.x,
+ pose.orientation.y,
+ pose.orientation.z,
+ ],
+ ),
+ )
+ )
+ res = Pose()
+ res.position.x = point[0]
+ res.position.y = point[1]
+ res.position.z = point[2]
+ res.orientation.w = quaternion[0]
+ res.orientation.x = quaternion[1]
+ res.orientation.y = quaternion[2]
+ res.orientation.z = quaternion[3]
+ return res
+
+
+def do_transform_pose_stamped(pose: PoseStamped, transform: TransformStamped) -> PoseStamped:
+ res = PoseStamped()
+ res.pose = do_transform_pose(pose.pose, transform)
+ res.header = transform.header
+ return res
diff --git a/perception_benchmark_tool/waymo_player_node.py b/perception_benchmark_tool/waymo_player_node.py
new file mode 100644
index 0000000..5aea05b
--- /dev/null
+++ b/perception_benchmark_tool/waymo_player_node.py
@@ -0,0 +1,405 @@
+# Copyright 2018 Autoware Foundation. All rights reserved.
+#
+# Licensed under the Apache License, Version 2.0 (the "License");
+# you may not use this file except in compliance with the License.
+# You may obtain a copy of the License at
+#
+# http://www.apache.org/licenses/LICENSE-2.0
+#
+# Unless required by applicable law or agreed to in writing, software
+# distributed under the License is distributed on an "AS IS" BASIS,
+# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
+# See the License for the specific language governing permissions and
+# limitations under the License.
+
+from glob import glob
+
+from autoware_auto_perception_msgs.msg import ObjectClassification
+from autoware_auto_perception_msgs.msg import Shape
+from autoware_auto_perception_msgs.msg import TrackedObject
+from autoware_auto_perception_msgs.msg import TrackedObjects
+from geometry_msgs.msg import TransformStamped
+from .benchmark_tools.datasets.waymo_dataset import WaymoDataset
+from .benchmark_tools.math_utils import rotation_matrix_to_euler_angles
+from .benchmark_tools.ros_utils import create_camera_info
+from .benchmark_tools.ros_utils import create_image_msgs
+from .benchmark_tools.ros_utils import create_point_cloud_mgs
+from .benchmark_tools.ros_utils import make_transform_stamped
+import rclpy
+from rclpy.clock import ClockType
+from rclpy.node import Node
+from rclpy.time import Time
+from sensor_msgs.msg import CameraInfo
+from sensor_msgs.msg import Image
+from sensor_msgs.msg import PointCloud2
+from sensor_msgs.msg import PointField
+from std_msgs.msg import Bool
+from std_srvs.srv import Trigger
+from tf2_ros import TransformBroadcaster
+from tf2_ros.static_transform_broadcaster import StaticTransformBroadcaster
+import tf_transformations
+from unique_identifier_msgs.msg import UUID
+from waymo_open_dataset import label_pb2
+from waymo_open_dataset.protos import metrics_pb2
+
+
+def get_tfrecord_paths(path):
+ tf_record_list = glob(path + "/*.tfrecord")
+ if len(tf_record_list) > 0:
+ return tf_record_list
+ else:
+ return None
+
+
+class PlayerNode(Node):
+ def __init__(self):
+ super().__init__("waymo_player_node")
+
+ self.declare_parameter("dataset_path", "")
+ dataset_path = self.get_parameter("dataset_path").get_parameter_value().string_value
+ self.tf_list = get_tfrecord_paths(dataset_path)
+
+ self.declare_parameter("use_camera", False)
+ self.use_camera = self.get_parameter("use_camera").get_parameter_value().bool_value
+
+ self.tf_segment_idx = 0
+
+ self.srv_read_scene_data = self.create_service(
+ Trigger, "read_current_segment", self.read_dataset_segment
+ )
+ self.srv_read_scene_data = self.create_service(
+ Trigger, "send_frame", self.frame_processed_callback
+ )
+ self.pub_segment_finished = self.create_publisher(Bool, "segment_finished", 1)
+
+ self.dataset = None
+ self.current_scene_processed = False
+
+ self.pub_lidar_front = self.create_publisher(PointCloud2, "/point_cloud/front_lidar", 10)
+ self.pub_lidar_rear = self.create_publisher(PointCloud2, "/point_cloud/rear_lidar", 10)
+ self.pub_lidar_side_left = self.create_publisher(
+ PointCloud2, "/point_cloud/side_left_lidar", 10
+ )
+ self.pub_lidar_side_right = self.create_publisher(
+ PointCloud2, "/point_cloud/side_right_lidar", 10
+ )
+ self.pub_lidar_top = self.create_publisher(PointCloud2, "/point_cloud/top_lidar", 10)
+
+ self.pub_gt_objects = self.create_publisher(TrackedObjects, "/gt_objects", 10)
+
+ if self.use_camera:
+ self.pub_camera_front = self.create_publisher(Image, "/front_camera", 10)
+ self.pub_camera_front_left = self.create_publisher(Image, "/front_left_camera", 10)
+ self.pub_camera_front_right = self.create_publisher(Image, "/front_right_camera", 10)
+ self.pub_camera_side_left = self.create_publisher(Image, "/side_left_camera", 10)
+ self.pub_camera_side_right = self.create_publisher(Image, "/side_right_camera", 10)
+
+ self.pub_cam_info_front = self.create_publisher(CameraInfo, "/front_cam_info", 10)
+ self.pub_cam_info_front_left = self.create_publisher(
+ CameraInfo, "/front_left_cam_info", 10
+ )
+ self.pub_cam_info_front_right = self.create_publisher(
+ CameraInfo, "/front_right_cam_info", 10
+ )
+ self.pub_cam_info_side_left = self.create_publisher(
+ CameraInfo, "/side_left_cam_info", 10
+ )
+ self.pub_cam_info_side_right = self.create_publisher(
+ CameraInfo, "/side_right_cam_info", 10
+ )
+
+ self.point_fields = [
+ PointField(name="x", offset=0, datatype=PointField.FLOAT32, count=1),
+ PointField(name="y", offset=4, datatype=PointField.FLOAT32, count=1),
+ PointField(name="z", offset=8, datatype=PointField.FLOAT32, count=1),
+ ]
+
+ self.pose_broadcaster = TransformBroadcaster(self)
+ self.static_tf_publisher = StaticTransformBroadcaster(self)
+
+ self.waymo_evaluation_frame = "base_link"
+
+ self.prediction_proto_objects = metrics_pb2.Objects()
+ self.gt_proto_objects = metrics_pb2.Objects()
+
+ def read_dataset_segment(self, request, response):
+
+ if self.tf_segment_idx >= len(self.tf_list):
+ self.get_logger().info("All Waymo segments in the given path have been processed.")
+ exit()
+
+ self.get_logger().info("Waymo segment decoding from dataset...")
+ self.dataset = WaymoDataset(self.tf_list[self.tf_segment_idx])
+ self.get_logger().info("Waymo segment decoded")
+ self.tf_segment_idx += 1
+ response.success = True
+ response.message = "Segment readed."
+ return response
+
+ def frame_processed_callback(self, request, response):
+
+ if not self.is_dataset_finished():
+ self.publish_scene()
+ response.success = True
+ response.message = "Frame published."
+ return response
+
+ else:
+ self.get_logger().info("Waymo segment finished.")
+ msg = Bool()
+ msg.data = True
+ self.pub_segment_finished.publish(msg)
+
+ response.success = False
+ response.message = "Dataset finished."
+ return response
+
+ # Below part copied
+ def publish_scene(self):
+ self.set_scene_processed(True)
+
+ current_scene = self.dataset.get_scene_from_dataset()
+ scene_time_as_ros_time = Time(
+ nanoseconds=int(current_scene["TIMESTAMP_MICRO"]) * 1000, clock_type=ClockType.ROS_TIME
+ )
+
+ self.publish_static_tf(scene_time_as_ros_time)
+ self.publish_pose(current_scene["VEHICLE_POSE"], scene_time_as_ros_time)
+ self.publish_lidar_data(current_scene, scene_time_as_ros_time)
+ self.publish_gt_objects(current_scene, scene_time_as_ros_time)
+
+ if self.use_camera:
+ self.publish_camera_images(current_scene, scene_time_as_ros_time)
+ self.publish_camera_info(current_scene, scene_time_as_ros_time)
+
+ def is_dataset_finished(self):
+ return self.dataset.is_finished()
+
+ def publish_pose(self, vehicle_pose, ros_time):
+ transform_stamped = TransformStamped()
+ transform_stamped.header.stamp = ros_time.to_msg()
+ transform_stamped.header.frame_id = "map"
+ transform_stamped.child_frame_id = "base_link"
+
+ rot_mat = vehicle_pose[0:3, 0:3]
+ [rx, ry, rz] = rotation_matrix_to_euler_angles(rot_mat)
+
+ transform_stamped.transform.translation.x = float(vehicle_pose[0, 3])
+ transform_stamped.transform.translation.y = float(vehicle_pose[1, 3])
+ transform_stamped.transform.translation.z = float(vehicle_pose[2, 3])
+
+ quat = tf_transformations.quaternion_from_euler(float(rx), float(ry), float(rz))
+
+ transform_stamped.transform.rotation.x = quat[0]
+ transform_stamped.transform.rotation.y = quat[1]
+ transform_stamped.transform.rotation.z = quat[2]
+ transform_stamped.transform.rotation.w = quat[3]
+
+ self.pose_broadcaster.sendTransform(transform_stamped)
+
+ def publish_static_tf(self, ros_time):
+ lidar_transforms = self.dataset.get_lidars_static_tf()
+
+ # Front lidar
+ static_ts_front_lidar = make_transform_stamped(
+ "base_link", "front_laser", lidar_transforms["FRONT_LASER_EXTRINSIC"], ros_time
+ )
+ # Rear lidar
+ static_ts_rear_lidar = make_transform_stamped(
+ "base_link", "rear_laser", lidar_transforms["REAR_LASER_EXTRINSIC"], ros_time
+ )
+ # Side left lidar
+ static_ts_side_left_lidar = make_transform_stamped(
+ "base_link", "side_left_laser", lidar_transforms["SIDE_LEFT_LASER_EXTRINSIC"], ros_time
+ )
+ # Side right lidar
+ static_ts_side_right_lidar = make_transform_stamped(
+ "base_link",
+ "side_right_laser",
+ lidar_transforms["SIDE_RIGHT_LASER_EXTRINSIC"],
+ ros_time,
+ )
+ # Top lidar
+ static_ts_top_lidar = make_transform_stamped(
+ "base_link", "top_laser", lidar_transforms["TOP_LASER_EXTRINSIC"], ros_time
+ )
+
+ camera_transforms = self.dataset.get_cameras_static_tf()
+ # Front camera
+ static_ts_front_camera = make_transform_stamped(
+ "base_link", "front_camera", camera_transforms["FRONT_CAM_EXTRINSIC"], ros_time
+ )
+ # Front left camera
+ static_ts_front_left_camera = make_transform_stamped(
+ "base_link",
+ "front_left_camera",
+ camera_transforms["FRONT_LEFT_CAM_EXTRINSIC"],
+ ros_time,
+ )
+ # Front right camera
+ static_ts_front_right_camera = make_transform_stamped(
+ "base_link",
+ "front_right_camera",
+ camera_transforms["FRONT_RIGHT_CAM_EXTRINSIC"],
+ ros_time,
+ )
+ # Side left camera
+ static_ts_side_left_camera = make_transform_stamped(
+ "base_link", "side_left_camera", camera_transforms["SIDE_LEFT_CAM_EXTRINSIC"], ros_time
+ )
+ # Side right camera
+ static_ts_side_right_camera = make_transform_stamped(
+ "base_link",
+ "side_right_camera",
+ camera_transforms["SIDE_RIGHT_CAM_EXTRINSIC"],
+ ros_time,
+ )
+
+ self.static_tf_publisher.sendTransform(
+ [
+ static_ts_front_lidar,
+ static_ts_rear_lidar,
+ static_ts_side_left_lidar,
+ static_ts_side_right_lidar,
+ static_ts_top_lidar,
+ static_ts_front_camera,
+ static_ts_front_left_camera,
+ static_ts_front_right_camera,
+ static_ts_side_left_camera,
+ static_ts_side_right_camera,
+ ]
+ )
+
+ def publish_camera_images(self, current_scene, ros_time_now):
+ self.pub_camera_front.publish(
+ create_image_msgs("front_camera", current_scene["FRONT_IMAGE"], ros_time_now)
+ )
+ self.pub_camera_front_left.publish(
+ create_image_msgs("front_left_camera", current_scene["FRONT_LEFT_IMAGE"], ros_time_now)
+ )
+ self.pub_camera_front_right.publish(
+ create_image_msgs(
+ "front_right_camera", current_scene["FRONT_RIGHT_IMAGE"], ros_time_now
+ )
+ )
+ self.pub_camera_side_left.publish(
+ create_image_msgs("side_left_camera", current_scene["SIDE_LEFT_IMAGE"], ros_time_now)
+ )
+ self.pub_camera_side_right.publish(
+ create_image_msgs("side_right_camera", current_scene["SIDE_RIGHT_IMAGE"], ros_time_now)
+ )
+
+ def publish_camera_info(self, current_scene, ros_time_now):
+ self.pub_cam_info_front.publish(
+ create_camera_info("base_link", current_scene["FRONT_CAM_INFO"], ros_time_now)
+ )
+ self.pub_cam_info_front_left.publish(
+ create_camera_info("base_link", current_scene["FRONT_LEFT_CAM_INFO"], ros_time_now)
+ )
+ self.pub_cam_info_front_right.publish(
+ create_camera_info("base_link", current_scene["FRONT_RIGHT_CAM_INFO"], ros_time_now)
+ )
+ self.pub_cam_info_side_left.publish(
+ create_camera_info("base_link", current_scene["SIDE_LEFT_CAM_INFO"], ros_time_now)
+ )
+ self.pub_cam_info_side_right.publish(
+ create_camera_info("base_link", current_scene["SIDE_RIGHT_CAM_INFO"], ros_time_now)
+ )
+
+ def publish_lidar_data(self, current_scene, ros_time_now):
+ self.pub_lidar_top.publish(
+ create_point_cloud_mgs("base_link", current_scene["TOP_LASER"], ros_time_now)
+ )
+ self.pub_lidar_front.publish(
+ create_point_cloud_mgs("base_link", current_scene["FRONT_LASER"], ros_time_now)
+ )
+ self.pub_lidar_side_left.publish(
+ create_point_cloud_mgs("base_link", current_scene["SIDE_LEFT_LASER"], ros_time_now)
+ )
+ self.pub_lidar_side_right.publish(
+ create_point_cloud_mgs("base_link", current_scene["SIDE_RIGHT_LASER"], ros_time_now)
+ )
+ self.pub_lidar_rear.publish(
+ create_point_cloud_mgs("base_link", current_scene["REAR_LASER"], ros_time_now)
+ )
+
+ def publish_gt_objects(self, current_scene, ros_time):
+
+ ground_truth_objects = TrackedObjects()
+ ground_truth_objects.header.frame_id = "base_link"
+ ground_truth_objects.header.stamp = ros_time.to_msg()
+
+ for gt_object in current_scene["GT_OBJECTS"]:
+
+ if gt_object.num_lidar_points_in_box <= 0:
+ continue
+
+ gt_detected_object = TrackedObject()
+ object_classification = ObjectClassification()
+ gt_detected_object.existence_probability = 1.0
+
+ if gt_object.type == label_pb2.Label.TYPE_VEHICLE:
+ object_classification.label = ObjectClassification.CAR
+ gt_detected_object.shape.type = Shape.BOUNDING_BOX
+ elif gt_object.type == label_pb2.Label.TYPE_PEDESTRIAN:
+ object_classification.label = ObjectClassification.PEDESTRIAN
+ gt_detected_object.shape.type = Shape.CYLINDER
+ elif gt_object.type == label_pb2.Label.TYPE_CYCLIST:
+ object_classification.label = ObjectClassification.BICYCLE
+ gt_detected_object.shape.type = Shape.BOUNDING_BOX
+ else:
+ continue
+
+ gt_detected_object.classification.append(object_classification)
+
+ # Pedestrian bounding boxes x and y fixed in Autoware
+ if gt_object.type == label_pb2.Label.TYPE_PEDESTRIAN:
+ gt_detected_object.shape.dimensions.x = 1.0
+ gt_detected_object.shape.dimensions.y = 1.0
+ gt_detected_object.shape.dimensions.z = gt_object.box.height
+ else:
+ gt_detected_object.shape.dimensions.x = gt_object.box.length
+ gt_detected_object.shape.dimensions.y = gt_object.box.width
+ gt_detected_object.shape.dimensions.z = gt_object.box.height
+
+ gt_detected_object.kinematics.pose_with_covariance.pose.position.x = (
+ gt_object.box.center_x
+ )
+ gt_detected_object.kinematics.pose_with_covariance.pose.position.y = (
+ gt_object.box.center_y
+ )
+ gt_detected_object.kinematics.pose_with_covariance.pose.position.z = (
+ gt_object.box.center_z
+ )
+
+ q = tf_transformations.quaternion_from_euler(0, 0, gt_object.box.heading)
+
+ gt_detected_object.kinematics.pose_with_covariance.pose.orientation.x = q[0]
+ gt_detected_object.kinematics.pose_with_covariance.pose.orientation.y = q[1]
+ gt_detected_object.kinematics.pose_with_covariance.pose.orientation.z = q[2]
+ gt_detected_object.kinematics.pose_with_covariance.pose.orientation.w = q[3]
+
+ str_1_encoded = gt_object.id.encode(encoding="UTF-8")
+ uuid_msg = UUID()
+
+ for i in range(16):
+ uuid_msg.uuid[i] = str_1_encoded[i]
+
+ gt_detected_object.object_id = uuid_msg
+ ground_truth_objects.objects.append(gt_detected_object)
+
+ self.pub_gt_objects.publish(ground_truth_objects)
+
+ def scene_processed(self):
+ return self.current_scene_processed
+
+ def set_scene_processed(self, value):
+ self.current_scene_processed = value
+
+
+def main(args=None):
+ rclpy.init(args=args)
+ perception_benchmark = PlayerNode()
+ rclpy.spin(perception_benchmark)
+ perception_benchmark.destroy_node()
+ rclpy.shutdown()
diff --git a/resource/perception_benchmark_tool b/resource/perception_benchmark_tool
new file mode 100644
index 0000000..e69de29
diff --git a/rviz/waymo.rviz b/rviz/waymo.rviz
new file mode 100644
index 0000000..d6f8fe1
--- /dev/null
+++ b/rviz/waymo.rviz
@@ -0,0 +1,364 @@
+Panels:
+ - Class: rviz_common/Displays
+ Help Height: 0
+ Name: Displays
+ Property Tree Widget:
+ Expanded:
+ - /Global Options1
+ Splitter Ratio: 0.5688889026641846
+ Tree Height: 482
+ - Class: rviz_common/Selection
+ Name: Selection
+ - Class: rviz_common/Tool Properties
+ Expanded: ~
+ Name: Tool Properties
+ Splitter Ratio: 0.5886790156364441
+ - Class: rviz_common/Views
+ Expanded:
+ - /Current View1
+ Name: Views
+ Splitter Ratio: 0.5
+ - Class: tier4_localization_rviz_plugin/InitialPoseButtonPanel
+ Name: InitialPoseButtonPanel
+ - Class: rviz_common/Time
+ Experimental: false
+ Name: Time
+ SyncMode: 0
+ SyncSource: ""
+Visualization Manager:
+ Class: ""
+ Displays:
+ - Class: rviz_default_plugins/TF
+ Enabled: true
+ Frame Timeout: 15
+ Frames:
+ All Enabled: true
+ Marker Scale: 1
+ Name: TF
+ Show Arrows: true
+ Show Axes: true
+ Show Names: true
+ Tree:
+ {}
+ Update Interval: 0
+ Value: true
+ - Alpha: 0.5
+ Cell Size: 1
+ Class: rviz_default_plugins/Grid
+ Color: 160; 160; 164
+ Enabled: false
+ Line Style:
+ Line Width: 0.029999999329447746
+ Value: Lines
+ Name: Grid
+ Normal Cell Count: 0
+ Offset:
+ X: 0
+ Y: 0
+ Z: 0
+ Plane: XY
+ Plane Cell Count: 10
+ Reference Frame:
+ Value: false
+ - Alpha: 0.4000000059604645
+ Autocompute Intensity Bounds: true
+ Autocompute Value Bounds:
+ Max Value: 5
+ Min Value: -1
+ Value: false
+ Axis: Z
+ Channel Name: intensity
+ Class: rviz_default_plugins/PointCloud2
+ Color: 255; 255; 255
+ Color Transformer: AxisColor
+ Decay Time: 0
+ Enabled: false
+ Invert Rainbow: false
+ Max Color: 255; 255; 255
+ Max Intensity: 4096
+ Min Color: 0; 0; 0
+ Min Intensity: 0
+ Name: ConcatenatePointCloud
+ Position Transformer: XYZ
+ Selectable: false
+ Size (Pixels): 1
+ Size (m): 0.019999999552965164
+ Style: Points
+ Topic:
+ Depth: 5
+ Durability Policy: Volatile
+ Filter size: 10
+ History Policy: Keep Last
+ Reliability Policy: Best Effort
+ Value: /sensing/lidar/concatenated/pointcloud
+ Use Fixed Frame: false
+ Use rainbow: true
+ Value: false
+ - Alpha: 0.9990000128746033
+ Autocompute Intensity Bounds: true
+ Autocompute Value Bounds:
+ Max Value: 15
+ Min Value: -2
+ Value: false
+ Axis: Z
+ Channel Name: z
+ Class: rviz_default_plugins/PointCloud2
+ Color: 200; 200; 200
+ Color Transformer: FlatColor
+ Decay Time: 0
+ Enabled: true
+ Invert Rainbow: false
+ Max Color: 255; 255; 255
+ Max Intensity: 15
+ Min Color: 0; 0; 0
+ Min Intensity: -5
+ Name: NoGroundPointCloud
+ Position Transformer: XYZ
+ Selectable: false
+ Size (Pixels): 3
+ Size (m): 0.019999999552965164
+ Style: Points
+ Topic:
+ Depth: 5
+ Durability Policy: Volatile
+ Filter size: 10
+ History Policy: Keep Last
+ Reliability Policy: Best Effort
+ Value: /perception/obstacle_segmentation/pointcloud
+ Use Fixed Frame: true
+ Use rainbow: true
+ Value: true
+ - BUS:
+ Alpha: 0.9990000128746033
+ Color: 30; 144; 255
+ CAR:
+ Alpha: 0.9990000128746033
+ Color: 30; 144; 255
+ CYCLIST:
+ Alpha: 0.9990000128746033
+ Color: 119; 11; 32
+ Class: autoware_auto_perception_rviz_plugin/TrackedObjects
+ Display 3d polygon: true
+ Display Label: true
+ Display PoseWithCovariance: true
+ Display Predicted Path Confidence: true
+ Display Predicted Paths: true
+ Display Twist: true
+ Display UUID: true
+ Display Velocity: true
+ Enabled: true
+ Line Width: 0.029999999329447746
+ MOTORCYCLE:
+ Alpha: 0.9990000128746033
+ Color: 119; 11; 32
+ Name: TrackedObjectsPrediction
+ Namespaces:
+ {}
+ PEDESTRIAN:
+ Alpha: 0.9990000128746033
+ Color: 255; 192; 203
+ TRAILER:
+ Alpha: 0.9990000128746033
+ Color: 30; 144; 255
+ TRUCK:
+ Alpha: 0.9990000128746033
+ Color: 30; 144; 255
+ Topic:
+ Depth: 5
+ Durability Policy: Volatile
+ History Policy: Keep Last
+ Reliability Policy: Reliable
+ Value: /perception/object_recognition/tracking/objects
+ UNKNOWN:
+ Alpha: 0.9990000128746033
+ Color: 255; 255; 255
+ Value: true
+ - BUS:
+ Alpha: 0.9990000128746033
+ Color: 255; 0; 0
+ CAR:
+ Alpha: 0.9990000128746033
+ Color: 255; 0; 0
+ CYCLIST:
+ Alpha: 0.9990000128746033
+ Color: 255; 255; 0
+ Class: autoware_auto_perception_rviz_plugin/TrackedObjects
+ Display 3d polygon: true
+ Display Label: true
+ Display PoseWithCovariance: true
+ Display Predicted Path Confidence: true
+ Display Predicted Paths: true
+ Display Twist: true
+ Display UUID: true
+ Display Velocity: true
+ Enabled: true
+ Line Width: 0.029999999329447746
+ MOTORCYCLE:
+ Alpha: 0.9990000128746033
+ Color: 255; 255; 0
+ Name: TrackedObjectsGroundTruth
+ Namespaces:
+ {}
+ PEDESTRIAN:
+ Alpha: 0.9990000128746033
+ Color: 0; 255; 0
+ TRAILER:
+ Alpha: 0.9990000128746033
+ Color: 255; 0; 0
+ TRUCK:
+ Alpha: 0.9990000128746033
+ Color: 255; 0; 0
+ Topic:
+ Depth: 5
+ Durability Policy: Volatile
+ History Policy: Keep Last
+ Reliability Policy: Reliable
+ Value: /gt_objects
+ UNKNOWN:
+ Alpha: 0.9990000128746033
+ Color: 255; 255; 255
+ Value: true
+ Enabled: true
+ Global Options:
+ Background Color: 10; 10; 10
+ Fixed Frame: map
+ Frame Rate: 30
+ Name: root
+ Tools:
+ - Class: rviz_default_plugins/Interact
+ Hide Inactive Objects: true
+ - Class: rviz_default_plugins/MoveCamera
+ - Class: rviz_default_plugins/Select
+ - Class: rviz_default_plugins/FocusCamera
+ - Class: rviz_default_plugins/Measure
+ Line color: 128; 128; 0
+ - Class: rviz_default_plugins/SetInitialPose
+ Covariance x: 0.25
+ Covariance y: 0.25
+ Covariance yaw: 0.06853891909122467
+ Topic:
+ Depth: 5
+ Durability Policy: Volatile
+ History Policy: Keep Last
+ Reliability Policy: Reliable
+ Value: /initialpose
+ - Class: rviz_default_plugins/SetGoal
+ Topic:
+ Depth: 5
+ Durability Policy: Volatile
+ History Policy: Keep Last
+ Reliability Policy: Reliable
+ Value: /planning/mission_planning/goal
+ - Class: rviz_plugins/PedestrianInitialPoseTool
+ Interactive: false
+ Pose Topic: /simulation/dummy_perception_publisher/object_info
+ Target Frame:
+ Theta std deviation: 0.0872664600610733
+ Velocity: 0
+ X std deviation: 0.029999999329447746
+ Y std deviation: 0.029999999329447746
+ Z position: 1
+ Z std deviation: 0.029999999329447746
+ - Class: rviz_plugins/CarInitialPoseTool
+ H vehicle height: 2
+ Interactive: false
+ L vehicle length: 4
+ Pose Topic: /simulation/dummy_perception_publisher/object_info
+ Target Frame:
+ Theta std deviation: 0.0872664600610733
+ Velocity: 3
+ W vehicle width: 1.7999999523162842
+ X std deviation: 0.029999999329447746
+ Y std deviation: 0.029999999329447746
+ Z position: 0
+ Z std deviation: 0.029999999329447746
+ - Class: rviz_plugins/MissionCheckpointTool
+ Pose Topic: /planning/mission_planning/checkpoint
+ Theta std deviation: 0.2617993950843811
+ X std deviation: 0.5
+ Y std deviation: 0.5
+ Z position: 0
+ - Class: rviz_plugins/DeleteAllObjectsTool
+ Pose Topic: /simulation/dummy_perception_publisher/object_info
+ Transformation:
+ Current:
+ Class: rviz_default_plugins/TF
+ Value: true
+ Views:
+ Current:
+ Class: rviz_default_plugins/ThirdPersonFollower
+ Distance: 70.71488952636719
+ Enable Stereo Rendering:
+ Stereo Eye Separation: 0.05999999865889549
+ Stereo Focal Distance: 1
+ Swap Stereo Eyes: false
+ Value: false
+ Focal Point:
+ X: -24.134923934936523
+ Y: 5.783570766448975
+ Z: 9.424427116755396e-05
+ Focal Shape Fixed Size: false
+ Focal Shape Size: 0.05000000074505806
+ Invert Z Axis: false
+ Name: Current View
+ Near Clip Distance: 0.009999999776482582
+ Pitch: 0.3797977864742279
+ Target Frame: base_link
+ Value: ThirdPersonFollower (rviz_default_plugins)
+ Yaw: 3.4276697635650635
+ Saved:
+ - Class: rviz_default_plugins/ThirdPersonFollower
+ Distance: 18
+ Enable Stereo Rendering:
+ Stereo Eye Separation: 0.05999999865889549
+ Stereo Focal Distance: 1
+ Swap Stereo Eyes: false
+ Value: false
+ Focal Point:
+ X: 0
+ Y: 0
+ Z: 0
+ Focal Shape Fixed Size: true
+ Focal Shape Size: 0.05000000074505806
+ Invert Z Axis: false
+ Name: ThirdPersonFollower
+ Near Clip Distance: 0.009999999776482582
+ Pitch: 0.20000000298023224
+ Target Frame: base_link
+ Value: ThirdPersonFollower (rviz)
+ Yaw: 3.141592025756836
+ - Angle: 0
+ Class: rviz_default_plugins/TopDownOrtho
+ Enable Stereo Rendering:
+ Stereo Eye Separation: 0.05999999865889549
+ Stereo Focal Distance: 1
+ Swap Stereo Eyes: false
+ Value: false
+ Invert Z Axis: false
+ Name: TopDownOrtho
+ Near Clip Distance: 0.009999999776482582
+ Scale: 10
+ Target Frame: viewer
+ Value: TopDownOrtho (rviz)
+ X: 0
+ Y: 0
+Window Geometry:
+ Displays:
+ collapsed: false
+ Height: 1041
+ Hide Left Dock: false
+ Hide Right Dock: true
+ InitialPoseButtonPanel:
+ collapsed: false
+ QMainWindow State: 000000ff00000000fd0000000400000000000001b70000037cfc020000000ffb0000001200530065006c0065006300740069006f006e00000001e10000009b0000005c00fffffffb000000120056006900650077007300200054006f006f02000001df000002110000018500000122fb000000200054006f006f006c002000500072006f0070006500720074006900650073003203000002880000011d000002210000017afb000000100044006900730070006c006100790073010000003b0000021d000000c700fffffffc0000025e00000159000000bb0100001afa000000000100000002fb0000000a0056006900650077007301000000000000033c0000010000fffffffb0000001e0054006f006f006c002000500072006f00700065007200740069006500730100000000ffffffff0000008f00fffffffb0000002000730065006c0065006300740069006f006e00200062007500660066006500720200000138000000aa0000023a00000294fb00000014005700690064006500530074006500720065006f02000000e6000000d2000003ee0000030bfb0000000c004b0069006e0065006300740200000186000001060000030c00000261fb0000000c00430061006d0065007200610100000682000000eb0000000000000000fb0000000a0049006d0061006700650100000505000002680000000000000000fb0000002c0049006e0069007400690061006c0050006f007300650042007500740074006f006e00500061006e0065006c000000068f000000de0000007100fffffffb0000002c0049006e0069007400690061006c0050006f007300650042007500740074006f006e00500061006e0065006c000000068f000000de0000000000000000fb00000030005200650063006f0067006e006900740069006f006e0052006500730075006c0074004f006e0049006d00610067006501000003190000009c0000000000000000fb00000030005200650063006f0067006e006900740069006f006e0052006500730075006c0074004f006e0049006d00610067006500000002ab000000e90000000000000000fb000000320049006d0061006700650030002f0072006f0069005f0063006c00750073007400650072005f0066007500690073006f006e010000027c0000013b0000000000000000000000010000015f000006fffc0200000002fb0000001e0054006f006f006c002000500072006f00700065007200740069006500730100000041000000780000000000000000fb0000001200530065006c0065006300740069006f006e010000025a000000b200000000000000000000000200000e7a0000005afc0100000001fb0000000a00560069006500770073030000004e00000080000002e100000197000000030000077e00000039fc0100000002fb0000000800540069006d006501000000000000077e0000024400fffffffb0000000800540069006d00650100000000000004500000000000000000000005c10000037c00000004000000040000000800000008fc0000000100000002000000010000000a0054006f006f006c00730100000000ffffffff0000000000000000
+ Selection:
+ collapsed: false
+ Time:
+ collapsed: false
+ Tool Properties:
+ collapsed: false
+ Views:
+ collapsed: false
+ Width: 1918
+ X: 0
+ Y: 38
diff --git a/setup.cfg b/setup.cfg
new file mode 100644
index 0000000..2750a3f
--- /dev/null
+++ b/setup.cfg
@@ -0,0 +1,4 @@
+[develop]
+script_dir=$base/lib/perception_benchmark_tool
+[install]
+install_scripts=$base/lib/perception_benchmark_tool
diff --git a/setup.py b/setup.py
new file mode 100644
index 0000000..176358b
--- /dev/null
+++ b/setup.py
@@ -0,0 +1,33 @@
+from glob import glob
+import os
+
+from setuptools import setup
+from setuptools import find_packages
+
+package_name = "perception_benchmark_tool"
+
+setup(
+ name=package_name,
+ version="0.0.1",
+ packages=find_packages(exclude=['test']),
+ data_files=[
+ ("share/ament_index/resource_index/packages", ["resource/" + package_name]),
+ ("share/" + package_name, ["package.xml"]),
+ (os.path.join("share", package_name, "launch"), glob("launch/*.launch.*")),
+ (os.path.join("share", package_name, "rviz"), glob("rviz/*.rviz")),
+ ],
+ install_requires=["setuptools"],
+ zip_safe=True,
+ maintainer="Kaan Colak",
+ maintainer_email="kcolak@leodrive.ai",
+ description="This package benchmark Autoware perception stack on Waymo dataset",
+ license="Apache License 2.0",
+ tests_require=["pytest"],
+ entry_points={
+ "console_scripts": [
+ "benchmark_node = perception_benchmark_tool.benchmark_node:main",
+ "waymo_player_node = perception_benchmark_tool.waymo_player_node:main",
+ "autoware_workflow_runner_node = perception_benchmark_tool.autoware_workflow_runner_node:main",
+ ],
+ },
+)
diff --git a/test/test_copyright.py b/test/test_copyright.py
new file mode 100644
index 0000000..f46f861
--- /dev/null
+++ b/test/test_copyright.py
@@ -0,0 +1,23 @@
+# Copyright 2015 Open Source Robotics Foundation, Inc.
+#
+# Licensed under the Apache License, Version 2.0 (the "License");
+# you may not use this file except in compliance with the License.
+# You may obtain a copy of the License at
+#
+# http://www.apache.org/licenses/LICENSE-2.0
+#
+# Unless required by applicable law or agreed to in writing, software
+# distributed under the License is distributed on an "AS IS" BASIS,
+# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
+# See the License for the specific language governing permissions and
+# limitations under the License.
+
+from ament_copyright.main import main
+import pytest
+
+
+@pytest.mark.copyright
+@pytest.mark.linter
+def test_copyright():
+ rc = main(argv=[".", "test"])
+ assert rc == 0, "Found errors"
diff --git a/test/test_flake8.py b/test/test_flake8.py
new file mode 100644
index 0000000..49c1644
--- /dev/null
+++ b/test/test_flake8.py
@@ -0,0 +1,23 @@
+# Copyright 2017 Open Source Robotics Foundation, Inc.
+#
+# Licensed under the Apache License, Version 2.0 (the "License");
+# you may not use this file except in compliance with the License.
+# You may obtain a copy of the License at
+#
+# http://www.apache.org/licenses/LICENSE-2.0
+#
+# Unless required by applicable law or agreed to in writing, software
+# distributed under the License is distributed on an "AS IS" BASIS,
+# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
+# See the License for the specific language governing permissions and
+# limitations under the License.
+
+from ament_flake8.main import main_with_errors
+import pytest
+
+
+@pytest.mark.flake8
+@pytest.mark.linter
+def test_flake8():
+ rc, errors = main_with_errors(argv=[])
+ assert rc == 0, "Found %d code style errors / warnings:\n" % len(errors) + "\n".join(errors)
diff --git a/test/test_pep257.py b/test/test_pep257.py
new file mode 100644
index 0000000..a2c3deb
--- /dev/null
+++ b/test/test_pep257.py
@@ -0,0 +1,23 @@
+# Copyright 2015 Open Source Robotics Foundation, Inc.
+#
+# Licensed under the Apache License, Version 2.0 (the "License");
+# you may not use this file except in compliance with the License.
+# You may obtain a copy of the License at
+#
+# http://www.apache.org/licenses/LICENSE-2.0
+#
+# Unless required by applicable law or agreed to in writing, software
+# distributed under the License is distributed on an "AS IS" BASIS,
+# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
+# See the License for the specific language governing permissions and
+# limitations under the License.
+
+from ament_pep257.main import main
+import pytest
+
+
+@pytest.mark.linter
+@pytest.mark.pep257
+def test_pep257():
+ rc = main(argv=[".", "test"])
+ assert rc == 0, "Found code style errors / warnings"