inaccurate meshing #896
Comments
|
Look at the tooltip on the orange flag on your images. The camera model is probably missing from the sensor database. |
|
Try:
If it is this model Tested on nine images: |

|
i tried this model (GoPro;FUSION;6.17;dpreview) with following results:
i also tried with only 9 images, like you have done, and that works without problems. it seems the problem occurs with more than one loop around the target object. also it seems like there are 3 layers of ground-floor-point-clouds in the SfM output instead of one. i know, it will take some time to compute, but it would be a very helpful information for me if the reconstruction with all 162 images causes the same problems for you. |

|
good news, it seems to work with more SIFT-Points AND "min observation for triangulation = 3" |
|
@TR7 Do you have the other side of the gopro fusion 360? If yes, could you share it? It would be interesting to declare it as a rig of 2 cameras and see if it improves the results. |
|
one the other side from the gopro, there is me standing in front of the camera, so not really useful. but i will take some other pictures and can of course share them (both sides with me only on the side). |
|
Here I proposed to collect user contributed datasets similar to the Monstree demo dataset to test 360 and fish eye images. |
|
whats your prefered amount of front/back photos per dataset? special kind of objects/places? |
|
@TR7 It would be ideal if you could make an indoor and an outdoor dataset. |
|
another outdoor dataset with 2x 128 JPGs from GoPro Fusion (both sides, 0.5 Sec Photo Timelapse): |
|
an here a small indoor dataset for test purposes: @fabiencastan |
|
@TR7 Thanks a lot! I see that you have already organized them as a rig of 2 cameras. Did you already tried to reconstruct them? And compare with/without using the rig? |
yes i tested a lot with over 14 datasets from the GoPro Fusion.
Some other (more about the rig) problems are unsolved yet:
|


|
@TR7 Can I add a few of your images to https://github.com/natowi/meshroom-360-datasets under CC-BY-SA-4.0 license? |
|
yes! |
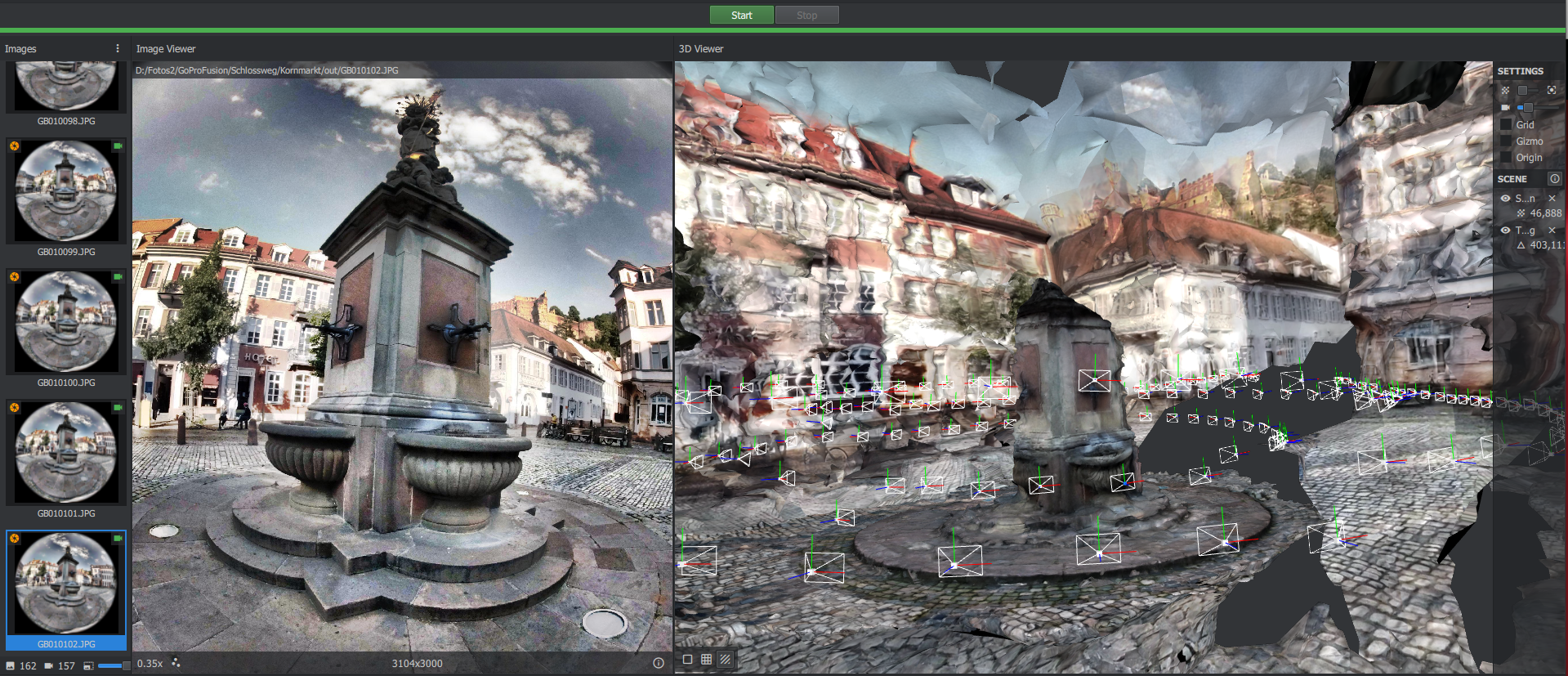
Describe the bug
inaccurate/broken meshing. I guess it's not supposed to be like this
To Reproduce
all other parameters are the defaults
Expected behavior
meshing should be a way better with the default values and so many pictures.
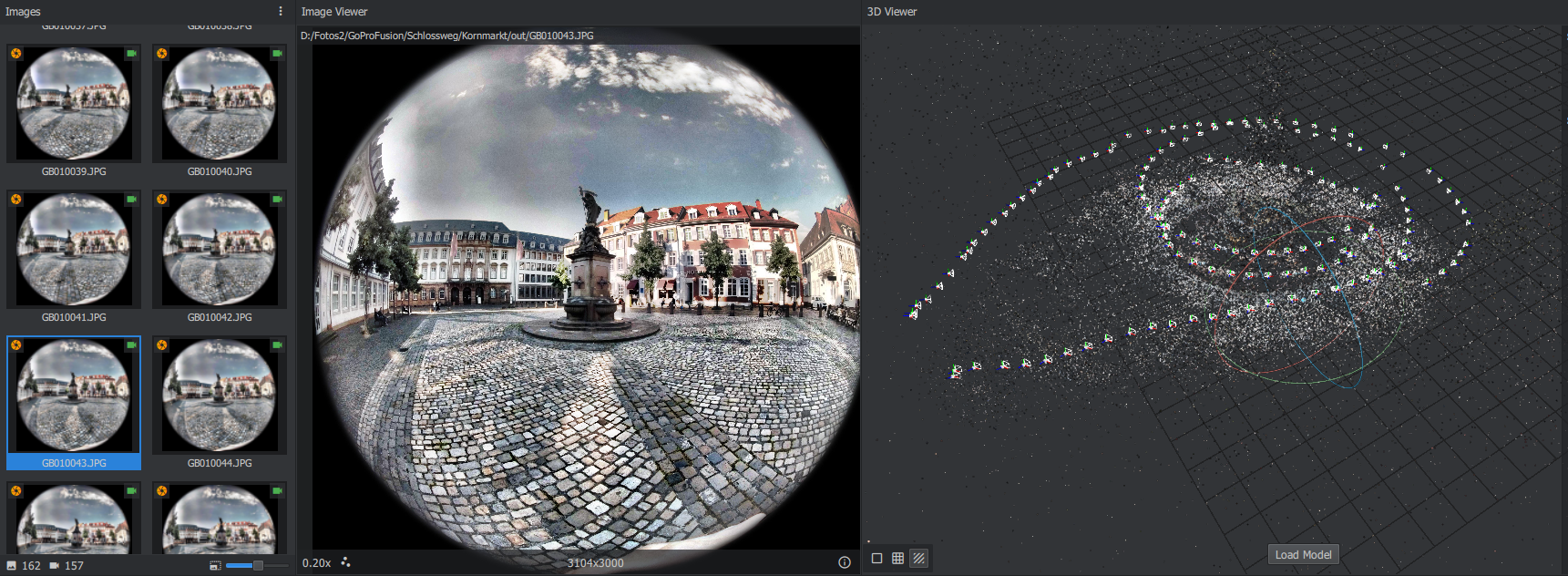
Screenshots
overview camera poses:
Logs
http://hosting141203.a2e6d.netcup.net/Thomas/HDKornmarkt/Logs.zip
Desktop (please complete the following and other pertinent information):
The text was updated successfully, but these errors were encountered: